
修控技术及编瘦 第二章计算机数拉系 主讲陈德道
第二章 计算机数控系 主讲 陈德道
第二节数控系统的基本原理 1.插补的概念 插补就是根据给定速度和给定轮廓线形的要求,在轮廓的己知点 之间,确定一些中间点的方法,即:数据密化的过程。 2.插补的实现 硬件插补:采用硬件的数字逻辑电路来完成插补工作 软件插补:由软件完成插补工作。 3.软件插补方法 按输出驱动信号方式的不同,软件插补方法可分为两大类: 脉冲增量插补,如:逐点比较法,DDA法,比较积分法: 数据采样插补,如:直接函数法,时间分割法,角度逼近插补法。 目录 一页 一页 后退 退出
第二节 数控系统的基本原理 插补就是根据给定速度和给定轮廓线形的要求,在轮廓的已知点 之间,确定一些中间点的方法,即:数据密化的过程。 数据采样插补,如:直 接函数法,时间分割法 ,角度逼近插补法。 脉冲增量插补,如:逐 点比较法, DDA法,比较积分法; 3.软件插补方法 2.插补的实现 1.插补的概念 硬件插补:采用硬件的数字逻辑电路来完成插补工作。 软件插补:由软件完成插补工作。 按输出驱动信号方式的不同,软件插补方法可分为两大类:
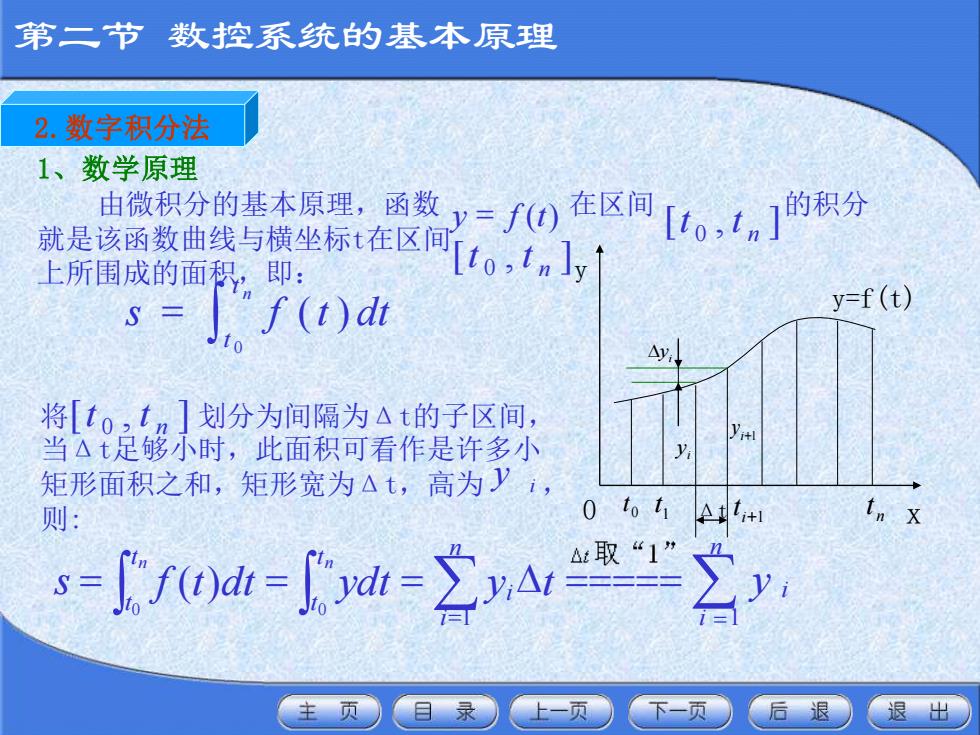
第二节数控系统的基本原理 2.数字积分法 1、数学原理 由微积台的基本原理,数y=f0在区间[。,1]的积分 就是该函数曲线与横坐标t在区间10,1,]y1 上所围成的面积,即: y=f(t) 将[t0,tn]划分为间隔为△t的子区间, 当△t足够小时,此面积可看作是许多小 矩形面积之和,矩形宽为△t,高为y1, 则 0 to 小oh-小w-立山2y 主页 目录 上一页 下一页 后退 退出
第二节 数控系统的基本原理 1、数学原理 由微积分的基本原理,函数 在区间 的积分 就是该函数曲线与横坐标t在区间 上所围成的面积,即: 将 划分为间隔为Δt的子区间, 当Δt足够小时,此面积可看作是许多小 矩形面积之和,矩形宽为Δt,高为 , 则: = n t t s f t dt 0 ( ) [ , ] 0 n t t [ , ] 0 n t t y = f (t) [ , ] 0 n t t y i n i = y i 1 = = = = D ===== n i i t t t t s f t dt ydt y t n n 1 0 0 ( ) y 0 0 t 1 t n t i+1 t i y i+1 y i Dy y=f(t) Δt x 2.数字积分法

第二节数控系统的基本原理 2.直线插补 1).基本原感理法显示该图片 如图直线0E,起点在原点,终点为E(xe,y。),Vx,vy表示 动点在X轴和Y轴的移动速度,则在X轴和Y轴上的微小移动增量△x 和Ay为: △x=yx△t 对直线函数来说,有: 业= =k Ay =v,At Xe ye 则: Ax=kx。△i Ay=y。At E(r.,y.) x=Tv,di=[kox. 累加代替积分 各坐标轴的 N 位移量为: 目录 上一页 下一页 后退 退出
2.直线插补 1).基本原理 如图直线OE,起点在原点,终点为E( ), 表示 动点在X轴和Y轴的移动速度,则在X轴和Y轴上的微小移动增量Δx 和Δy为: 对直线函数来说,有: 则: 各坐标轴的 位移量为: e e x , y x y v , v D = D D = D y v t x v t y x k y v x v e y e x = = D = D D = D y ky t x kx t e e = = ======= D = = ======= D = = t t m i y y e t m i e t x e y v dt kv dt ky t x v dt kx dt kx t 0 0 1 0 1 0 第二节 数控系统的基本原理
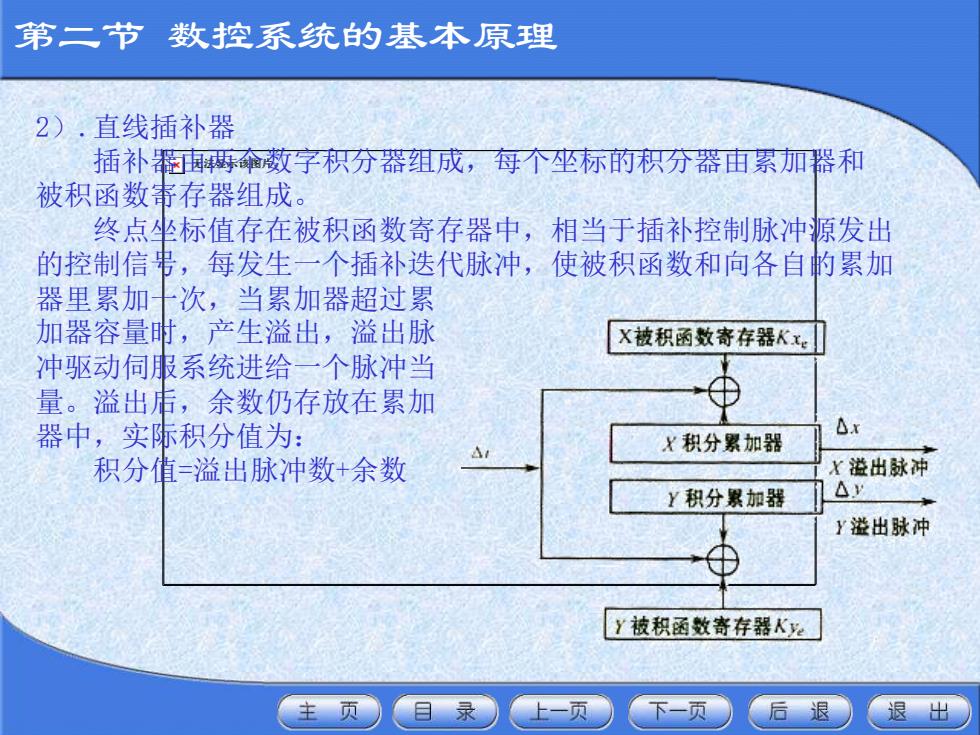
第二节数控系统的基本原理 2).直线插补器 插补罨琴命数字积分器组成,每个坐标的积分器由累加器和 被积函数韦存器组成。 终点坐标值存在被积函数寄存器中,相当于插补控制脉冲源发出 的控制信考,每发生一个插补迭代脉冲,使被积函数和向各自的累加 器里累加十次,当累加器超过累 加器容量时,产生溢出,溢出脉 X被积函数寄存器Kx, 冲驱动同康系统进给一个脉冲当 量。溢出店,余数仍存放在累加 器中,实际积分值为: X积分累加器 积分值=溢出脉冲数+余数 X溢出脉冲 Y积分累加器 △y Y溢出脉冲 Y被积函数寄存器Ky 主页 目录 上一页 下一页 后退 退出
2).直线插补器 插补器由两个数字积分器组成,每个坐标的积分器由累加器和 被积函数寄存器组成。 终点坐标值存在被积函数寄存器中,相当于插补控制脉冲源发出 的控制信号,每发生一个插补迭代脉冲,使被积函数和向各自的累加 器里累加一次,当累加器超过累 加器容量时,产生溢出,溢出脉 冲驱动伺服系统进给一个脉冲当 量。溢出后,余数仍存放在累加 器中,实际积分值为: 积分值=溢出脉冲数+余数 第二节 数控系统的基本原理