5.1矢量法 3.加速度 点的速度矢对时间的变化率称为加速度。点的加 速度也是矢量,它表征了速度大小和方向的变化。点 的加速度等于它的速度对时间的一阶导数,也等于它的矢径对 时间的二阶导数。 a=lim △v_dvdr △t→0△t dt dt2 有时为了方便,在字母上方加“”表示该量对时间的 一阶导数,如“”表示该量对时间的二阶导数。 a=v=i
3. 加速度 2 2 0 d d lim →t t t t d d = = = v v r a 点的速度矢对时间的变化率称为加速度。点的加 速度也是矢量,它表征了速度大小和方向的变化。点 的加速度等于它的速度对时间的一阶导数,也等于它的矢径对 时间的二阶导数。 5.1 矢量法 有时为了方便,在字母上方加“.”表示该量对时间的 一阶导数,加“.”表示该量对时间的二阶导数。 a v r = =

5.1矢量法 加速度的方向确定 如在空间任意取一点O,把动点M在连续不同瞬时 的速度矢0,y1,2,.等都平行地移到点O,连接各矢量 的端点M1,M2,M3,就构成了矢量v端点的连续 曲线,称为速度矢端曲线,如图所示。动点的加速度 矢的方向与速度矢端曲线在相应点M的切线相平行。 速度矢端曲线 M
如在空间任意取一点O,把动点M在连续不同瞬时 的速度矢v0 ,v1 ,v2,.等都平行地移到点O,连接各矢量 的端点M1,M2,M3,.,就构成了矢量v端点的连续 曲线,称为速度矢端曲线,如图所示。动点的加速度 矢a的方向与速度矢端曲线在相应点M的切线相平行。 5.1 矢量法 速度矢端曲线 O M1 M2 M3 v v1 v2 a 加速度的方向确定
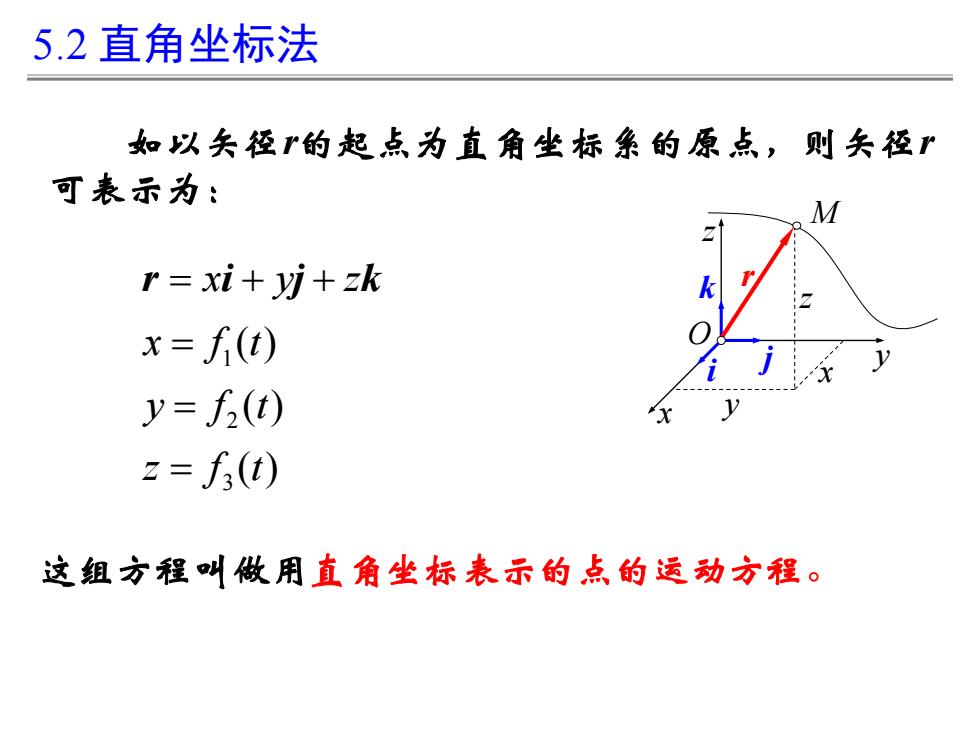
5.2直角坐标法 如以矢径”的起点为直角坐标系的原点,则矢径” 可表示为: r=xi+yj+zk x=f(t) y=f(t) z=f(t) 这组方程叫做用直角坐标表示的点的运动方程
这组方程叫做用直角坐标表示的点的运动方程。 1 2 3 ( ) ( ) ( ) x f t y f t z f t = = = r i j k = + + x y z 如以矢径r的起点为直角坐标系的原点,则矢径r 可表示为: 5.2 直角坐标法 M r O k i j y y x x z z
5.2直角坐标法 速度 速度在各坐标轴上的投影等于动点的各对应坐标对 时间的一阶导数。 v=产=xi+j+k=vi+vj+vk 若已知速度的投影,则速度的大小为 v=V2+2+2 其方向余孩为 cos.0=文cos》=卡cosm,)=目
x y z v r i j k i j k = = + + = + + x y z v v v 速度在各坐标轴上的投影等于动点的各对应坐标对 时间的一阶导数。 速度 5.2 直角坐标法 若已知速度的投影,则速度的大小为 2 2 2 v = x + y + z 其方向余弦为 cos( , ) , cos( , ) , cos( , ) x y z v v v v i v j v k = = =