3,平面四杆机构的基本知识 由余弦定律有: ZB]CD=arccos [b2+c2-(d-a)2]/2bc 若∠B1CD≤90°,则y1三∠B1CD ZB2C2D=arccos [b2+c2-(d+a)2]/2bc 若∠B2C2D>90°,则y2=180°-∠BC2D 干面和机模及宜语计 ymin=[∠B,CD,180°-∠B2C2D] 机构的传动角一般在运动链最终一个从动件上度量。 所量大学 KINJIANG UNIVERSITY 机械设计教研室
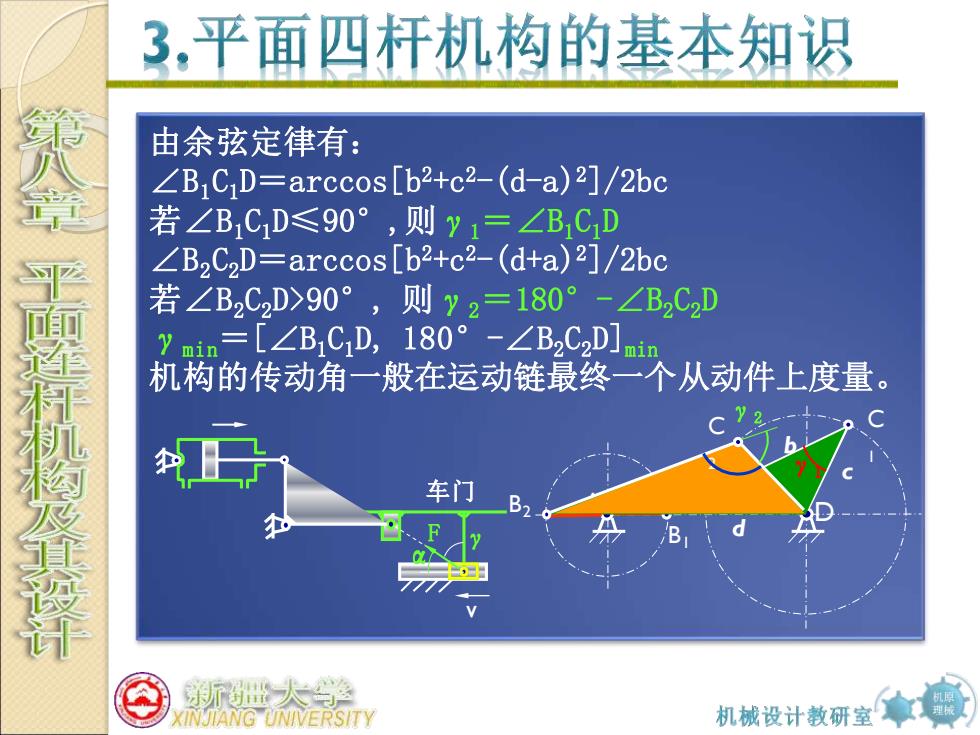
机原 理械 由余弦定律有: ∠B1C1D=arccos[b2+c2-(d-a)2]/2bc 若∠B1C1D≤90° ,则γ1=∠B1C1D ∠B2C2D=arccos[b2+c2-(d+a) 2]/2bc 若∠B2C2D>90° , 则γ2=180°-∠B2C2D γmin=[∠B1C1D, 180°-∠B2C2D]min 机构的传动角一般在运动链最终一个从动件上度量。 车门 v γ α F C 1 B1 a b c d D A γ1 C 2 B2 γ2
3,平面四杆机构的基本知迟 4.机构的死点(dead point)位置 摇杆为主动件,且连杆 与曲柄两次共线时,有: y=0 此时机构不能运动. 称此位置为: “死点”7=0 避免措施: 两组机构错开排列,如加构; 靠飞轮的惯性 (如内然机、缝纫机等) 斯世大学 XINJIANG UNIVERSITY 机械设计教研室拿
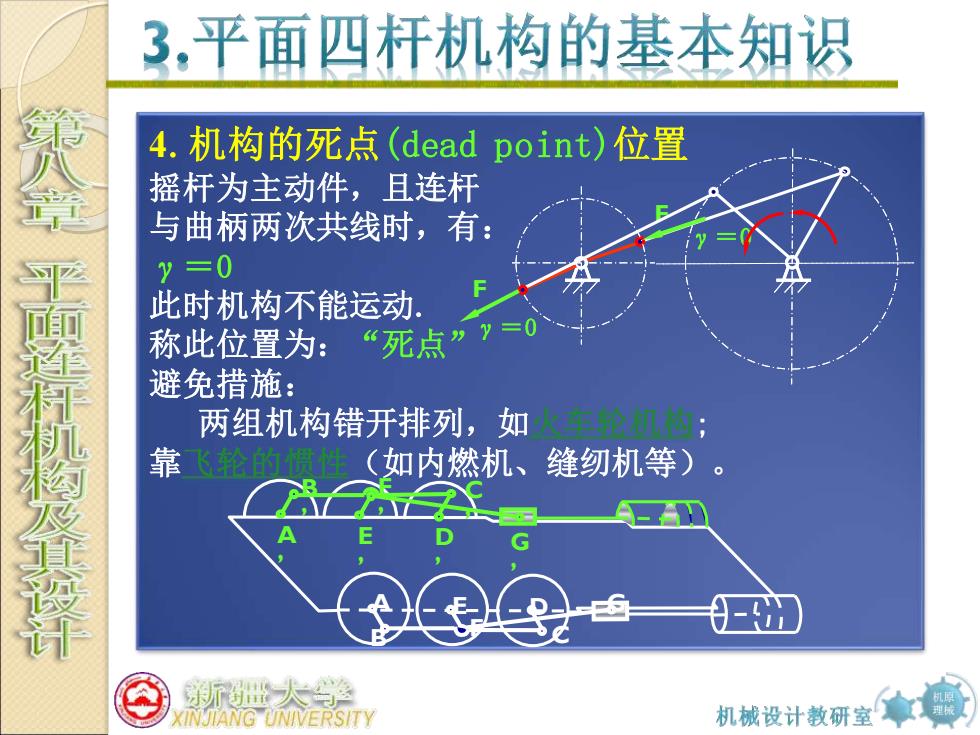
机原 理械 4 .机构的死点(dead point)位置 摇杆为主动件,且连杆 与曲柄两次共线 时,有: γ = 0 此时机构不能运动 . 称此位置为: “死点 ” 避免措施: 两组机构错开排列,如火车轮机构 ; 靠飞轮的惯性(如内燃机、缝纫机等)。 F γ= 0 Fγ = 0 F’ A’ E’ D’ G’ B’ C’ AB E F D C G
3,平面四杆机构的基本知识 也可以利用死点进行工作:飞机起落架、钻夹具等。 第八干面连行机构及拍孩计 B 飞机起落架 钻孔夹具 所量大 KINJIANG UNIVERSITY 机械设计教研室
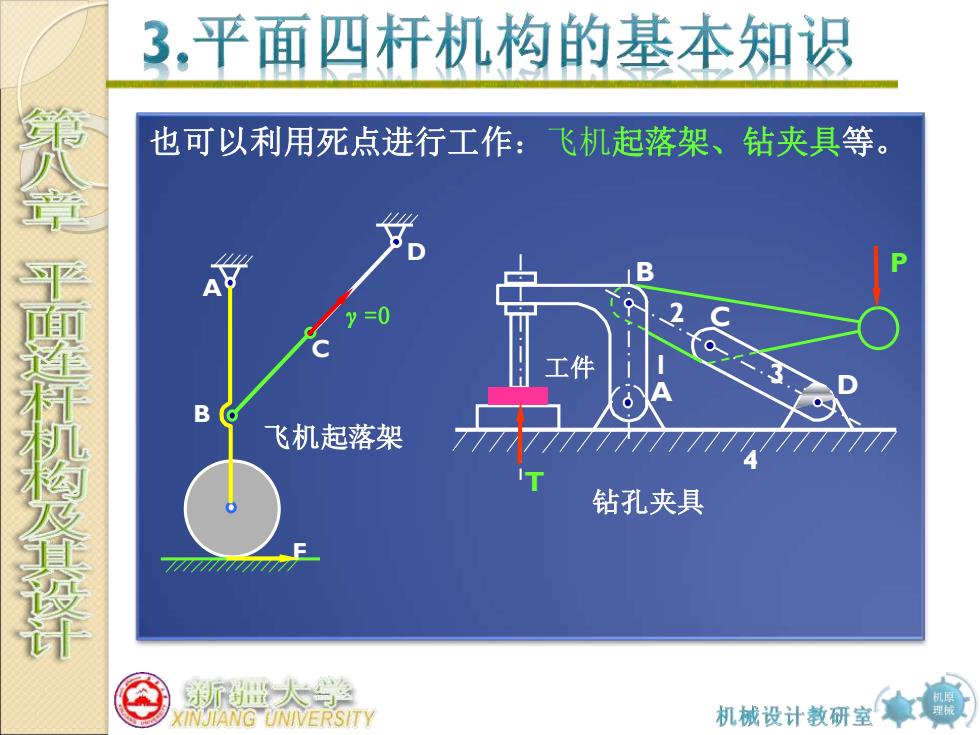
机原 理械 也可以利用死点进行工作:飞机起落架、钻夹具等。 A B C D 1 2 3 4 工件 P 钻孔夹具 T 飞机起落架 A B C D γ=0 F
3,平面四杆机构的基本知识 5.较链四杆机构的运动连续性 指连杆机构能否连续实现给定的各个位置。 可行域:摇杆的运动范围。 不可行域:摇杆不能达到的区域。 设计时不能要求从一个可行域跳过不可行域进入另 个可行域。称此为错位不连续。 错序不连续 设计连杆机构时,应满足运动连续性条件。 世大学 KINJIANG UNIVERSITY 机械设计教研室拿】
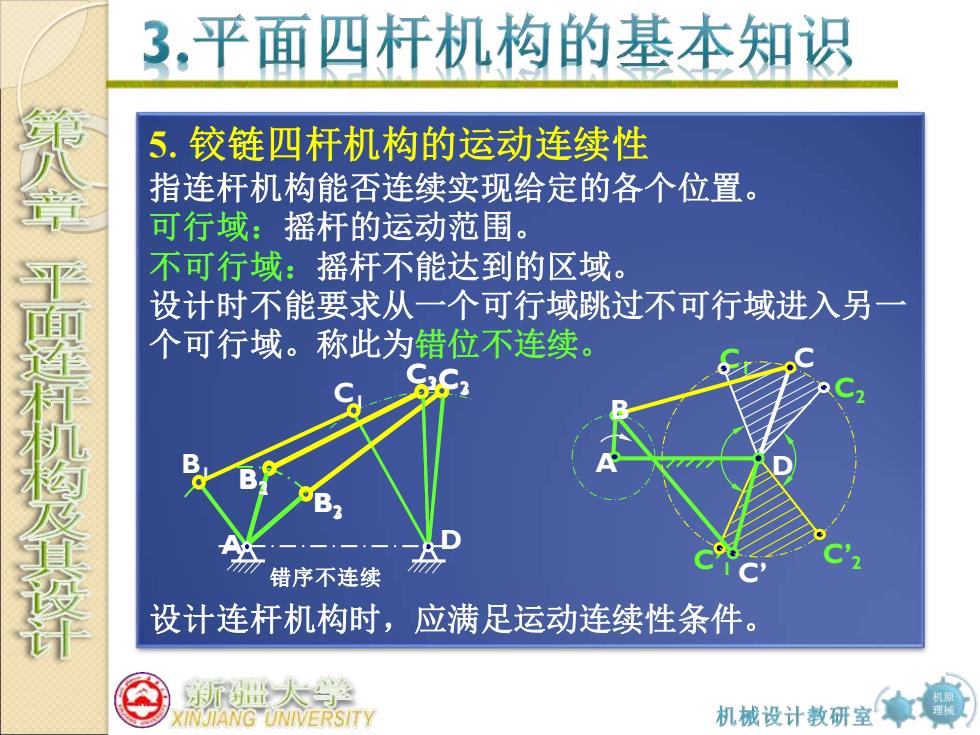
机原 理械 5.铰链四杆机构的运动连续性 指连杆机构能否连续实现给定的各个位置。 可行域:摇杆的运动范围。 不可行域:摇杆不能达到的区域。 设计时不能要求从一个可行域跳过不可行域进入另一 个可行域。称此为错位不连续。 设计连杆机构时,应满足运动连续性条件。 C1 C2 C’1 C’2 C’ C A D B 错序不连续 A D B1 C1 B2 C2 B3 C3 2 2 B3 C3
4,平面四杆机构的设计 、连杆机构设计的基本问题 机构选型一根据给定的运动要 求选择机构的类型; 尺度综合一确定各构件的尺度 参数(长度尺寸)。 同时要满足其他辅助条件: >结构条件(如要求有曲柄、杆 长比恰当、运动副结构合理等) >动力条件(如yin); >运动连续性条件等。 所世大学 XINJIANG UNIVERSITY 机械设计教研室
机原 理械 一、 连杆机构设计的基本问题 机构选型-根据给定的运动要 求选择机构的类型; 尺度综合-确定各构件的尺度 参数(长度尺寸)。 同时要满足其他辅助条件: ➢结构条件(如要求有曲柄、杆 长比恰当、运动副结构合理等); ➢动力条件(如γmin); ➢运动连续性条件等。 γ