本章内容简介 11.1 齿轮及其分类 第十一章世忙系及其设计 11 定轴轮系的传动比 周转轮系的传动比 11 复合轮系的传动比 11 轮系的功用 11 行星轮系的效率 11 行星轮系类型选择及其设计 11.8 其他新型行星齿轮传动简介 KINJIANG UNIVERSITY 机械设计教研室
机原 理械 11 .1 齿轮及其分类 11 .2 定轴轮系的传动比 11 .3 周转轮系的传动比 11 .4 复合轮系的传动比 11 .5 轮系的功用 11 .6 行星轮系的效率 11 .7 行星轮系类型选择及其设计 11 .8 其他新型行星齿轮传动简介
S11-1 轮系的类型 定义:由齿轮组成的传动系统一简称轮系 定轴轮系(轴线固 平面定轴轮系 定) 空间定轴轮系 轮系分类 周转轮系(轴有公转) 差动轮系 行星轮系 复合轮系(两者混 齿轻景及其设计 合) 本章要解决的问题: 1.轮系传动比i的计算: 2.从动轮转向的判断。 INJIANG UNIVERSITY 机械设计教研室
机原 理械
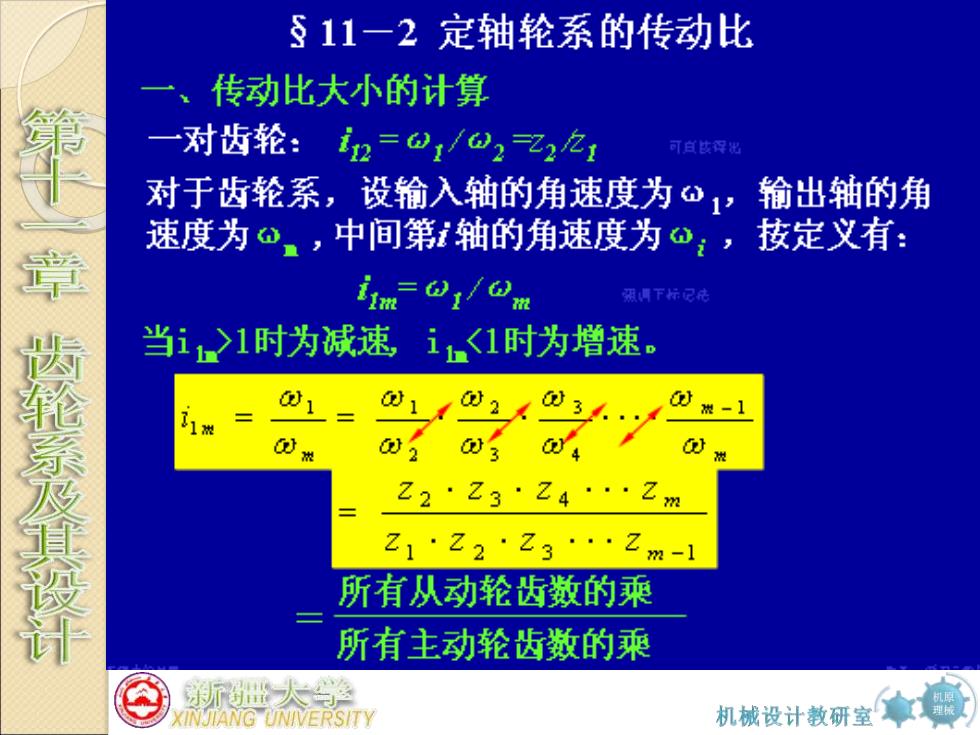
§11一2定轴轮系的传动比 一、传动比大小的计算 一对齿轮:i2=0,/02乙221 可直达得进 对于齿轮系,设输入轴的角速度为⊙1 输出轴的角 速度为⊙。,中间第1轴的角速度为⊙,按定义有: iim1/0m 博下标记 当i1>1时为减速i1.1时为增速。 齿业景及设计 1= 2 3 -1 Z2·Z3·24···Zm Z1·Z2·Z3··2m-1 所有从动轮齿数的乘 所有主动轮齿数的乘 世大学 CINJIANG UNIVERSITY 机械设计教研室
机原 理械
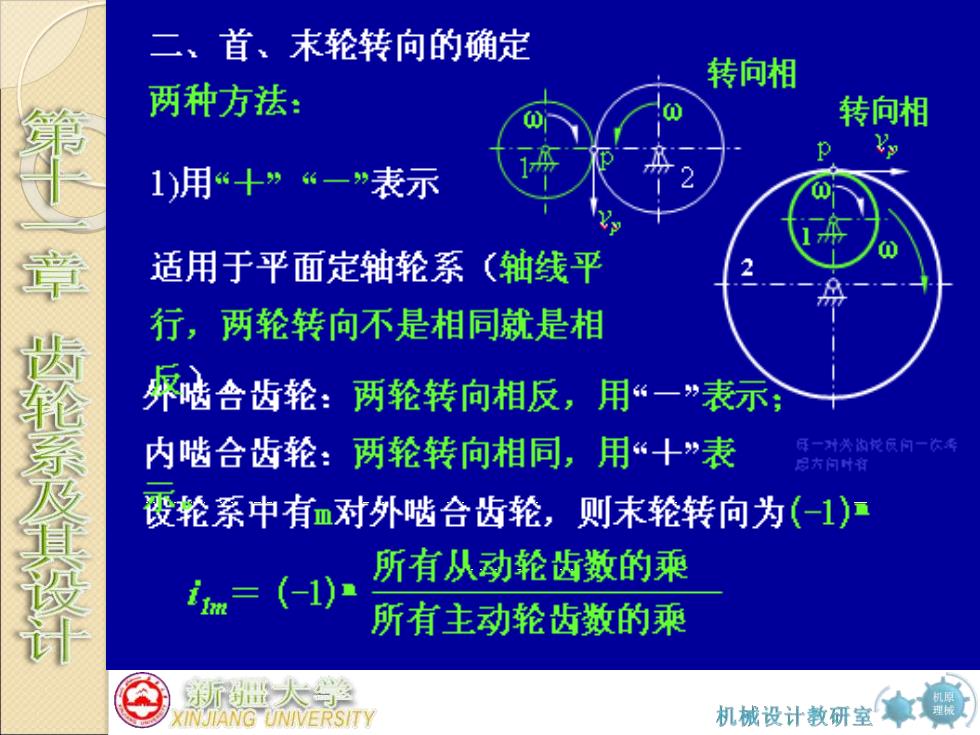
二、首、末轮转向的确定 转向相 两种方法: 转向相 1)用“十”“一”表示 适用于平面定轴轮系(轴线平 行,两轮转向不是相同就是相 齿轻景及其设计 承酷合齿轮:两轮转向相反,用“一“表示 内啮合齿轮:两轮转向相同,用“十”表 每一州水汝悦反问一次 日大问时润 爱轮系中有血对外啮合齿轮,则末轮转向为(-1) 所有从动轮齿数的乘 (-1) 所有主动轮齿数的乘 INJIANG UNIVERSITY 机械设计教研室
机原 理械
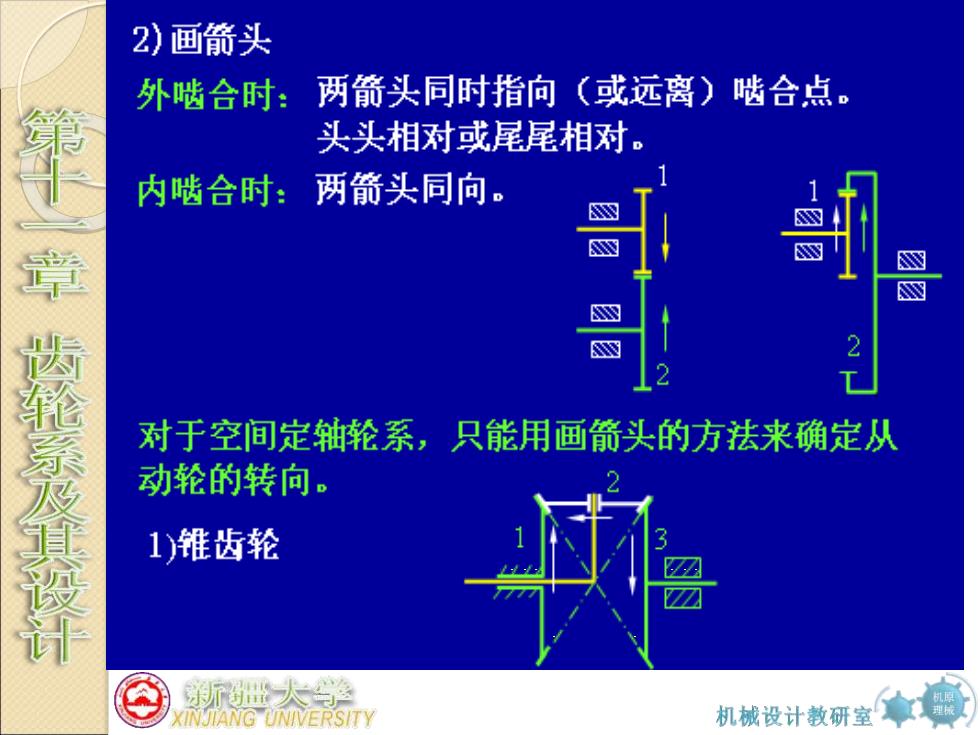
2)画箭头 外啮合时: 两箭头同时指向(或远离)啮合点。 头头相对或尾尾相对。 内啮合时:两箭头同向。 章世轮京及设计 对于空间定轴轮系,只能用画箭头的方法来确定从 动轮的转向。 1)雏齿轮 世大洛 KINJIANG UNIVERSITY 机械设计教研室拿】
机原 理械