本章内容简介 绿八会干面连河机构灰到漫计 8.1 连杆机构及其传动特点 8 .2 平面四杆机构的类型和应用 8.3 平面四杆机构的基本知识 8 .4 平面四杆机构的设计 8 5 多杆机构 世大 KINJIANG UNIVERSITY 机械设计教研室
机原 理械 8 .1 连杆机构及其传动特点 8 .2 平面四杆机构的类型和应用 8 .3 平面四杆机构的基本知识 8 .4 平面四杆机构的设计 8 .5 多杆机构
1,连杆机构及其传动特点 第八 应用实例: 内然机、鹤武吊、火车轮、手动床、生头刺宋、帽 圆仪、机械手爪、 开窗户支撑、公共汽车开关门、折 叠伞、折叠床、牙膏简拔管机、单车制动操作机构等 定义:由低副(转动、移动)连接组成的平面机构。 特征:有一作平面运动的构件,称为连杆。 特点: >采用低副。面接触、承载大、便于润滑、不易磨损 形状简单、易加工、容易获得较高的制造精度。 >改变杆的相对长度,从动件运动规律不同。 >连杆曲线丰富。可满足不同要求。 INJIANG UNIVERSITY 机械设计教研室 理械
机原 理械 应用实例: 内燃机、鹤式吊、火车轮、手动冲床、牛头刨床、椭 圆仪、机械手爪、开窗户支撑、公共汽车开关门、折 叠伞、折叠床、 牙膏筒拔管机、单车制动操作机构等。 定义:由低副(转动、移动)连接组成的平面机构。 特征:有一作平面运动的构件,称为连杆。 特点: ➢采用低副。面接触、承载大、便于润滑、不易磨损 形状简单、易加工、容易获得较高的制造精度。 ➢改变杆的相对长度,从动件运动规律不同。 ➢连杆曲线丰富。可满足不同要求
1,连杆机构及其传动特点 缺点 >构件和运动副多,累积误差大、运动精度低、效率 低。 >产生动载荷(惯性力),不适合高速。 >设计复杂, 难以实现精确的轨迹。 分类:芒面连杆机构、空任列构 常以构件数命名: 四杆机构、多杆机构。 本章重点内容是介绍四杆机构 世大学 KINJIANG UNIVERSITY 机械设计教研室拿
机原 理械 缺点: ➢构件和运动副多,累积误差大、运动精度低、效率 低。 ➢产生动载荷(惯性力),不适合高速。 ➢设计复杂,难以实现精确的轨迹。 分类:平面连杆机构、空间连杆机构 常以构件数命名: 四杆机构、多杆机构。 本章重点内容是介绍四杆机构
2,平面四杆机构的类型和应 1.平面四杆机构的基本型式 基本型式一铰链四杆机构,其它四杆机构都是由它演变得 到 名词解释: 曲柄(crank)一作整周定轴回转的构件; 连杆(coupler)一作平面运动的构件; 摇杆(rocker)一作定轴摆动的构件; 连架杆(side1ink)一与机架相联的构件; 周转副(revelute pair of revolving motion) 能作 360°相对回转的运动副; 摆转副(revelute pair of swing motion)一只能作有限 角度摆动的运动副。 (1)曲柄摇杆机 (crank-rocker mechanism) 特征:曲柄十摇杆 作用:将曲柄整周回转转变为摇杆往复摆动。如雷达天线 INJIANG UNIVERSITY 机械设计教研室
机原 理械 1.平面四杆机构的基本型式 基本型式-铰链四杆机构,其它四杆机构都是由它演变得 到 名词解释: 曲柄(crank)—作整周定轴回转的构件; 连杆(coupler)—作平面运动的构件; 摇杆(rocker)—作定轴摆动的构件; 连架杆(side link)—与机架相联的构件; 周转副(revelute pair of revolving motion)—能作 360˚相对回转的运动副; 摆转副(revelute pair of swing motion)—只能作有限 角度摆动的运动副。 (1)曲柄摇杆机构(crank-rocker mechanism) 特征:曲柄+摇杆 作用:将曲柄整周回转转变为摇杆往复摆动。如雷达天线
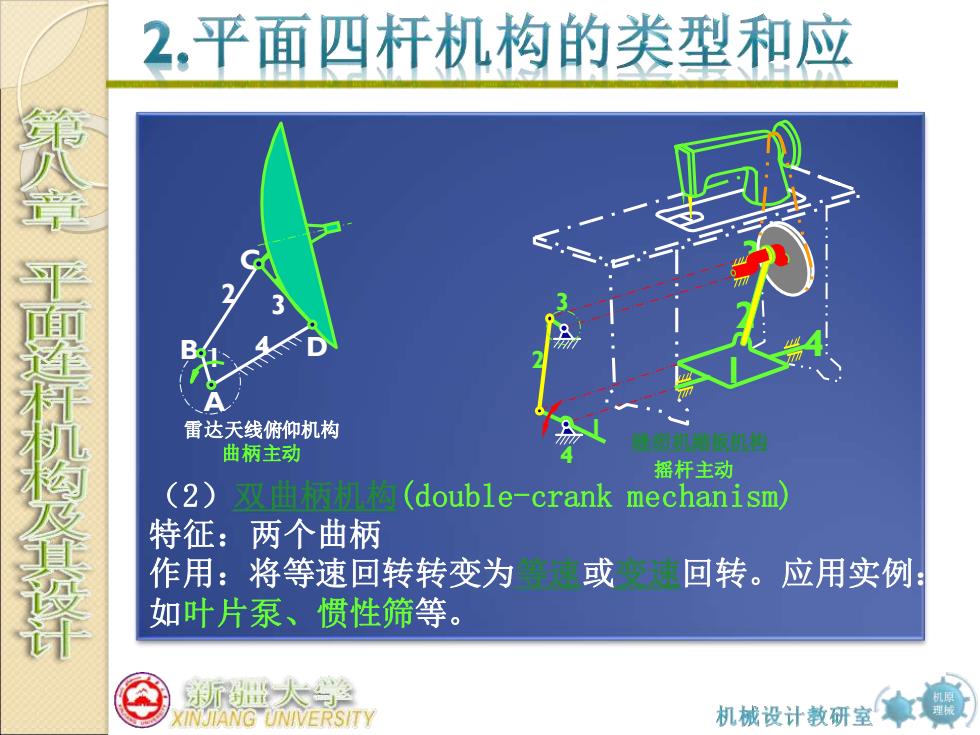
2,平面四杆机构的类型和应 雷达天线俯仰机构 曲柄主动 摇杆主动 (2)双曲s构(double-crank mechanism) 特征:两个曲柄 作用:将等速回转转变为速或变回转。应用实例 如叶片泵、惯性筛等。 新世大学 KINJIANG UNIVERSITY 机械设计教研室
机原 理械 (2)双曲柄机构(double-crank mechanism) 特征:两个曲柄 作用:将等速回转转变为等速或变速回转。应用实例: 如叶片泵、惯性筛等。 A B C 1 2 4 3 D 雷达天线俯仰机构 曲柄主动 缝纫机踏板机构 2 1 4 3 摇杆主动 3 1 2 4