3.1.2空间汇交力系的合成与平衡 2.平衡 空间汇交力系平衡的必要与充分条件是:该力条的合 力等于零。 FR=∑F=0 以解析式表示为: ∑F=0 ∑F=0 ∑F=0 空间汇交力条平衡的必要与充分条件是:该力系条力条 中所有各力在三个坐标轴上的投影的代数和分别等于 零
2. 平衡 空间汇交力系平衡的必要与充分条件是:该力系的合 力等于零。 R 0 F F = =i 以解析式表示为: 3.1.2 空间汇交力系的合成与平衡 0 0 0 x y z F F F = = = 空间汇交力系平衡的必要与充分条件是:该力系力系 中所有各力在三个坐标轴上的投影的代数和分别等于 零
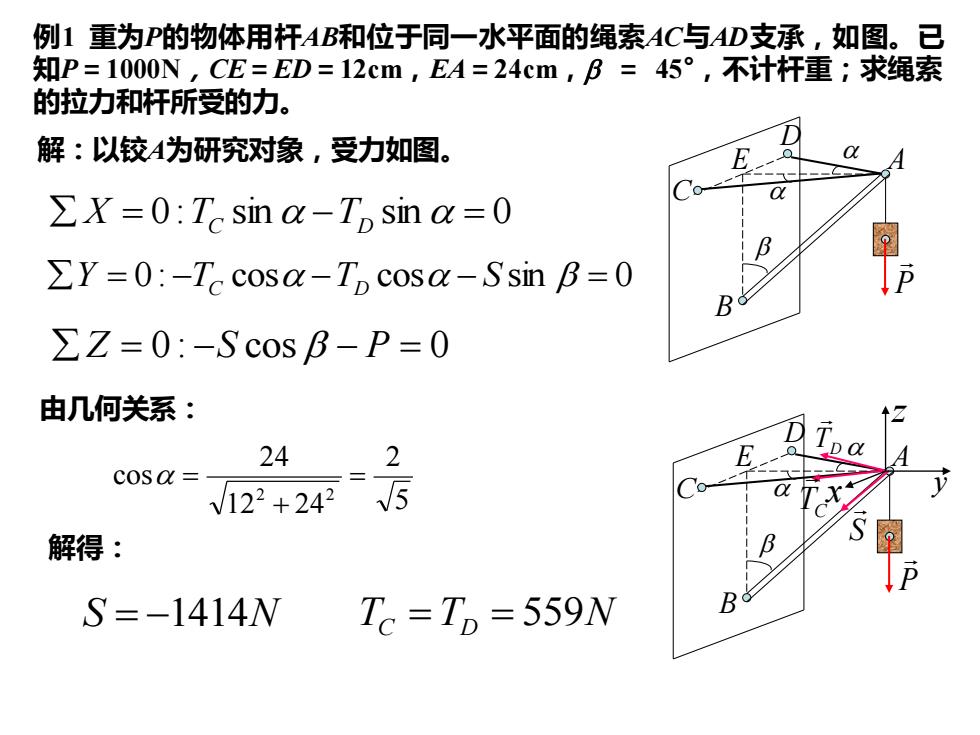
例1重为P的物体用杆AB和位于同一水平面的绳索AC与AD支承,如图。已 知P=1000N,CE=ED=12cm,EA=24cm,B=45°,不计杆重;求绳索 的拉力和杆所受的力。 解:以较A为研究对象,受力如图。 X=0:T sin a-T sin a=0 Y=0:-Tc cosa-Tp cosa-Ssin B=0 B ∑Z=0:-S cos B-P=0 由几何关系: 24 2 cosa= V122+242 解得: S=-1414W Tc=T,=559N B
A B C D E P A B C D E P TD TC S x y z 例1 重为P的物体用杆AB和位于同一水平面的绳索AC与AD支承,如图。已 知P=1000N,CE=ED=12cm,EA=24cm, = 45° ,不计杆重;求绳索 的拉力和杆所受的力。 解:以铰A为研究对象,受力如图。 X = 0:TC sin −TD sin = 0 Y = 0: −TC cos −TD cos − S sin = 0 Z = 0 : −S cos − P = 0 由几何关系: 5 2 12 24 24 cos 2 2 = + = 解得: S = −1414N TC = TD = 559N
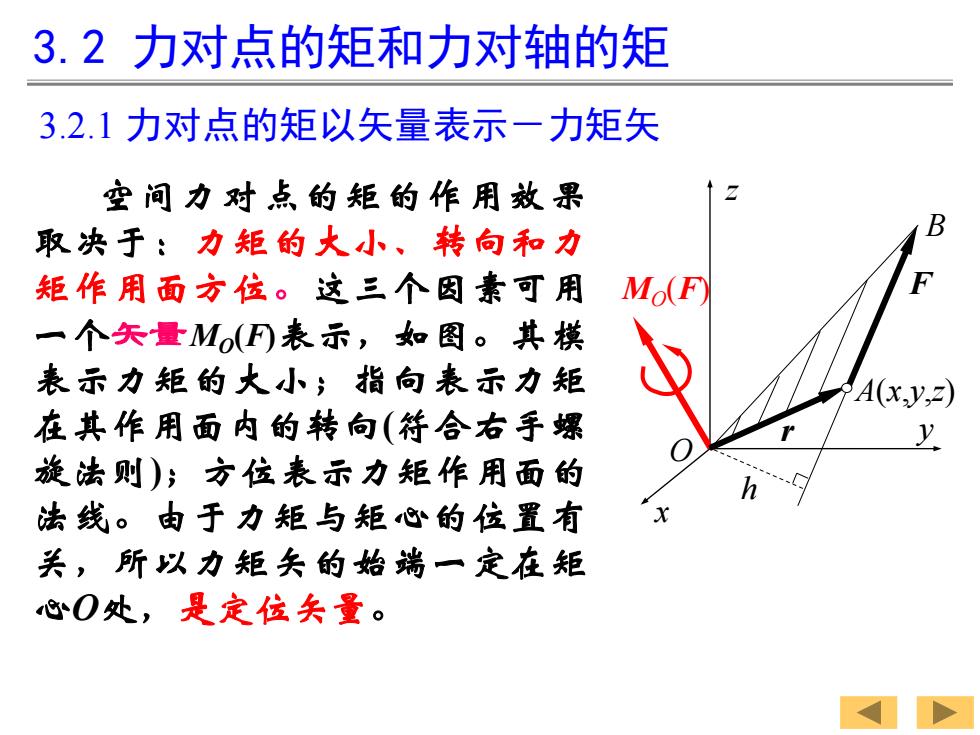
3.2力对点的矩和力对轴的矩 3.2.1力对点的矩以矢量表示一力矩矢 空间力对点的矩的作用效果 取决于:力矩的大小、转向和力 矩作用面方位。这三个因素可用 Mo(F) 一个矢量Mo(可表示,如图。其模 表示力矩的大小;指向表示力矩 A(x,y,2) 在其作用面内的转向(符合右手螺 y 旋法则);方位表示力矩作用面的 法线。由于力矩与矩心的位置有 关,所以力矩矢的始端一定在矩 心O处,是定位矢量
3.2 力对点的矩和力对轴的矩 3.2.1 力对点的矩以矢量表示-力矩矢 x y z O M F O(F) r A(x,y,z) h B 空间力对点的矩的作用效果 取决于:力矩的大小、转向和力 矩作用面方位。这三个因素可用 一个矢量MO(F)表示,如图。其模 表示力矩的大小;指向表示力矩 在其作用面内的转向(符合右手螺 旋法则);方位表示力矩作用面的 法线。由于力矩与矩心的位置有 关,所以力矩矢的始端一定在矩 心O处,是定位矢量
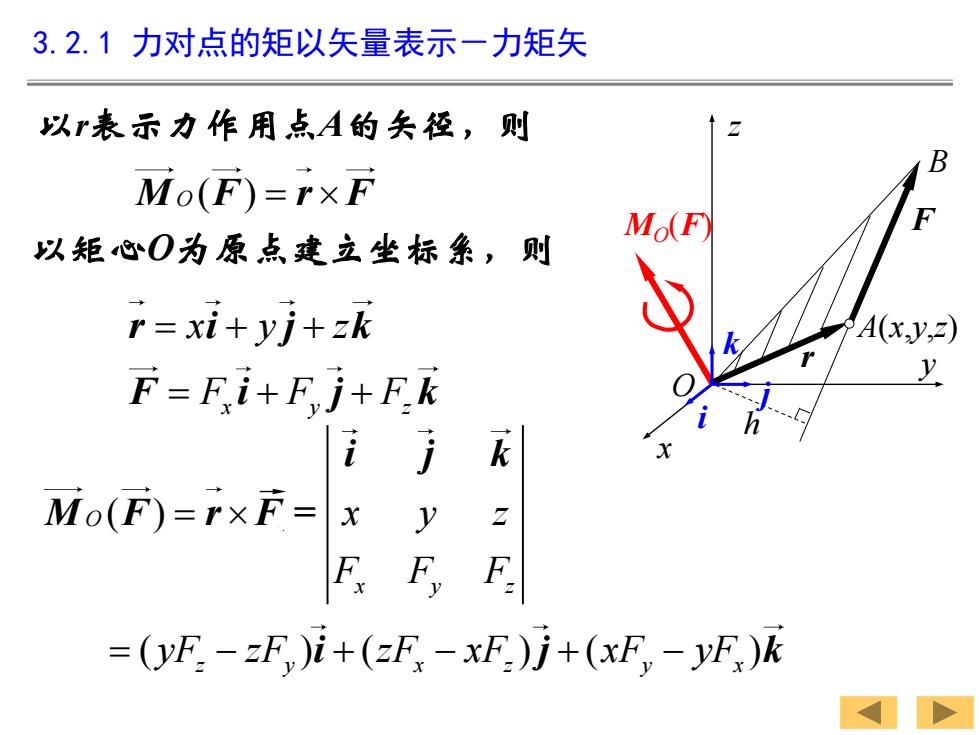
3.2.1力对点的矩以矢量表示一力矩矢 以r表示力作用点A的矢径,则 B Mo(F)=rxF Mo(F) 以矩心O为原点建立坐标系,则 r=xi+yj+zk A(x.y,) F=Fi+Fj+Fk Mo(F)=rxF=x y z =(yF:-zF,)i+(zF-xF.)j+(xF,-yF,)k
3.2.1 力对点的矩以矢量表示-力矩矢 以r表示力作用点A的矢径,则 M F r F O ( ) = 以矩心O为原点建立坐标系,则 x y z x y z F F F = + + = + + r i j k F i j k ( ) ( ) ( ) ( ) O x y z z y x z y x x y z F F F yF zF zF xF xF yF = = − + − + − i j k M F r F = i j k x y z O M F O(F) r A(x,y,z) h B j i k
3.2.1力对点的矩以矢量表示一力矩矢 力矩矢Mo(F在三个坐标轴上的投 影为 B [Mo(F)]=yF:-F Mo(F [Mo(F)〗,=zF-xF A(xy,) [Mo(F)]:=xF,-yF
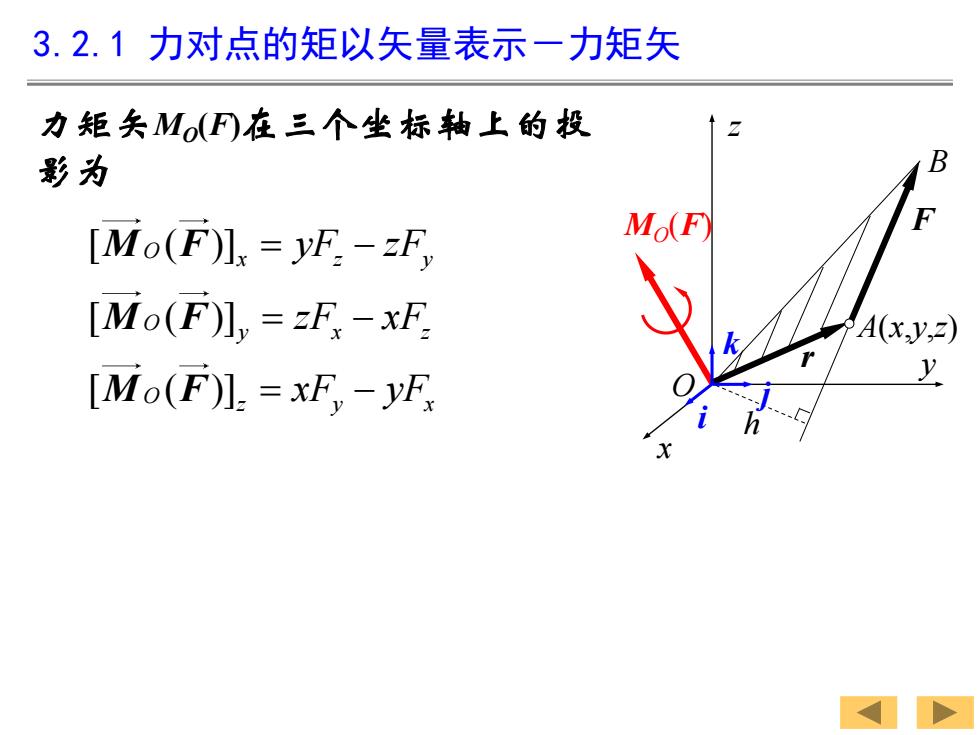
3.2.1 力对点的矩以矢量表示-力矩矢 力矩矢MO(F)在三个坐标轴上的投 影为 [ ( )] [ ( )] [ ( )] O x z y O y x z O z y x yF zF zF xF xF yF = − = − = − M F M F M F x y z O M F O(F) r A(x,y,z) h B j i k