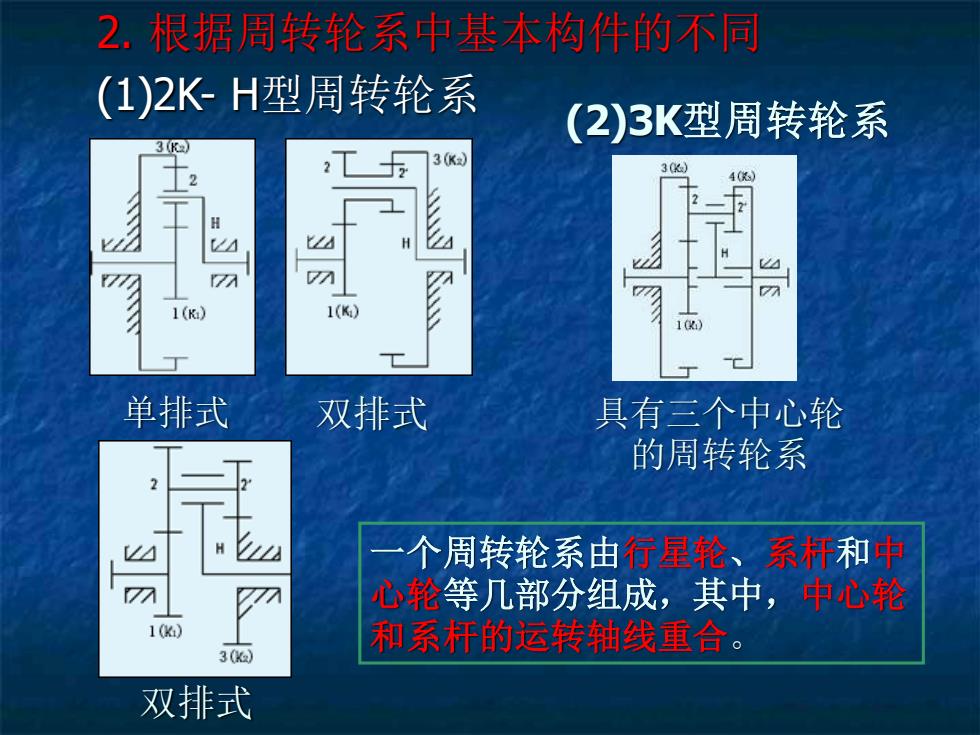
2. 根据周转轮系中基本构件的不同 (1)2K- H型周转轮系 单排式 双排式 双排式 (2)3K型周转轮系 具有三个中心轮 的周转轮系 一个周转轮系由行星轮、系杆和中 心轮等几部分组成,其中,中心轮 和系杆的运转轴线重合
2. 根据周转轮系中基本构件的不同 (1)2K- H型周转轮系 单排式 双排式 双排式 (2)3K型周转轮系 具有三个中心轮 的周转轮系 一个周转轮系由行星轮、系杆和中 心轮等几部分组成,其中,中心轮 和系杆的运转轴线重合

§6-2 定轴轮系的传动比 1、传动比定义 轮系中输入轴的角速度(或转速)与输出轴的 角速度(或转速)之比,即: 2、一对齿轮的传动比 1 2 2 1 12 z z i = = 正号:表示转向相同,用于内啮合 负号:表示转向相反,用于外啮合
§6-2 定轴轮系的传动比 1、传动比定义 轮系中输入轴的角速度(或转速)与输出轴的 角速度(或转速)之比,即: 2、一对齿轮的传动比 1 2 2 1 12 z z i = = 正号:表示转向相同,用于内啮合 负号:表示转向相反,用于外啮合
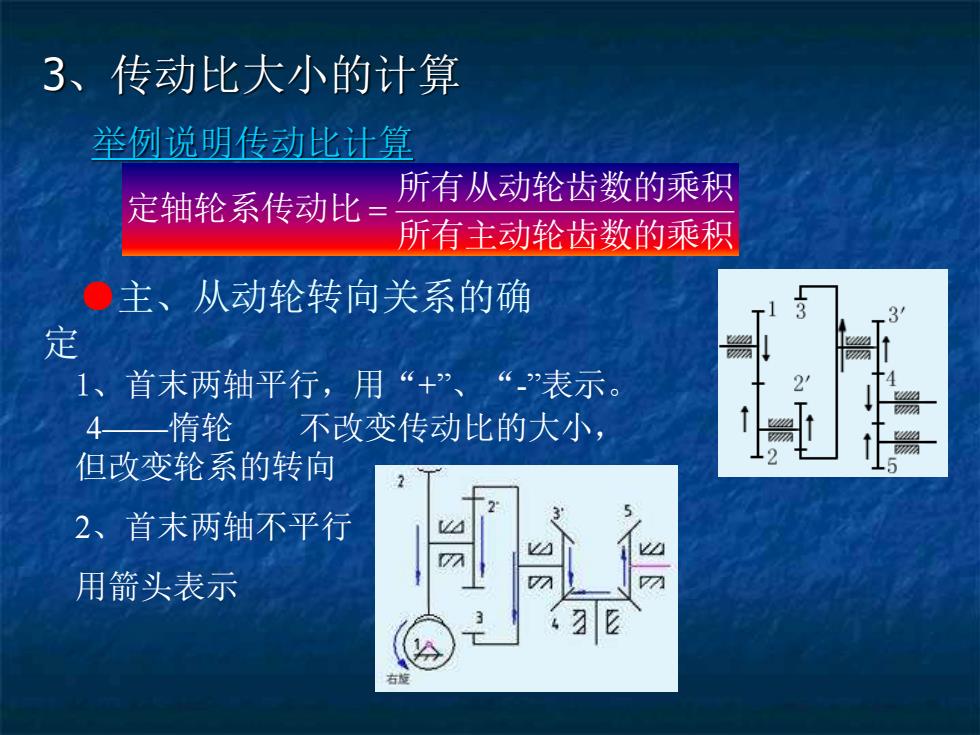
3、传动比大小的计算 举例说明传动比计算 ●主、从动轮转向关系的确 定 1、首末两轴平行,用“+”、 “-”表示。 4——惰轮 不改变传动比的大小, 但改变轮系的转向 2、首末两轴不平行 用箭头表示 所有主动轮齿数的乘积 所有从动轮齿数的乘积 定轴轮系传动比 =
3、传动比大小的计算 举例说明传动比计算 ●主、从动轮转向关系的确 定 1、首末两轴平行,用“+”、 “-”表示。 4——惰轮 不改变传动比的大小, 但改变轮系的转向 2、首末两轴不平行 用箭头表示 所有主动轮齿数的乘积 所有从动轮齿数的乘积 定轴轮系传动比 =

3、所有轴线都平行 所有主动轮齿数的乘积 m 所有从动轮齿数的乘积 i ( 1) 5 1 = = − m——外啮合的次数 4、所有齿轮的几何轴线不都平行,但首、尾两轮的轴 线互相平行 仍可在传动比的计算结果中加上"+"、 "-"号来表示主、 从动轮的转向关系
3、所有轴线都平行 所有主动轮齿数的乘积 m 所有从动轮齿数的乘积 i ( 1) 5 1 = = − m——外啮合的次数 4、所有齿轮的几何轴线不都平行,但首、尾两轮的轴 线互相平行 仍可在传动比的计算结果中加上"+"、 "-"号来表示主、 从动轮的转向关系