第5章轮系 §5-1轮条的类型 §5一2定轴轮系及其传动比 §5一3周转轮系及其传动比 §5一4复合轮条及其传动比 §5-5轮象的应用 §5一6几种特殊的行星传动简介 HIGHER EDUCATION PRESS
新疆大学专用 作者: 潘存云教授 第5章 轮 系 §5-1 轮系的类型 §5-2 定轴轮系及其传动比 §5-3 周转轮系及其传动比 §5-4 复合轮系及其传动比 §5-5 轮系的应用 §5-6 几种特殊的行星传动简介
§5- 1轮系的类型 定义:由齿轮组成的传动系统一简称轮系 平面定轴轮系 定轴轮系(轴线固定) 空间定轴轮系 轮系分类 周转轮系 (轴有公转 差动轮系(F=2) L行星轮系(F=1) 复合轮系(两者混合) 本章要解决的问题: 1.轮系传动比i的计算; 2.从动轮转向的判断
新疆大学专用 作者: 潘存云教授 §5-1 轮系的类型 定义:由齿轮组成的传动系统-简称轮系 本章要解决的问题: 轮系分类 周转轮系(轴有公转) 定轴轮系(轴线固定) 复合轮系(两者混合) 差动轮系(F=2) 行星轮系(F=1) 1.轮系传动比 i 的计算; 2.从动轮转向的判断。 平面定轴轮系 空间定轴轮系

§5一2定轴轮系及其传动比 一、传动比大小的计算 一对齿轮:i12=01/@2=221 可直接得田 对于齿轮系,设输入轴的角速度为o1, 输出轴的 角速度为⊙。,按定义有: iim-01/0m 强调下标记洁 当i1m>1时为减速,i1m<1时为增速。 m-1 11m 爱常y 22·z3·Z4·2m z1·z2·z3··2m-1 所有从动轮齿数的乘积 所有主动轮齿数的乘积 作者:潘存云教
新疆大学专用 作者: 潘存云教授 §5-2 定轴轮系及其传动比 一、传动比大小的计算 i1m=ω1 /ωm 强调下标记法 对于齿轮系,设输入轴的角速度为ω1,输出轴的 角速度为ωm ,按定义有: 一对齿轮: i12 =ω1 /ω2 =z2 /z1 可直接得出 当i1m>1时为减速, i1m<1时为增速。 m m i 1 1 = 1 2 3 1 2 3 4 − = m m z z z z z z z z m m 1 4 3 3 2 2 1 − = 所有从动轮齿数的乘积 所有主动轮齿数的乘积 =
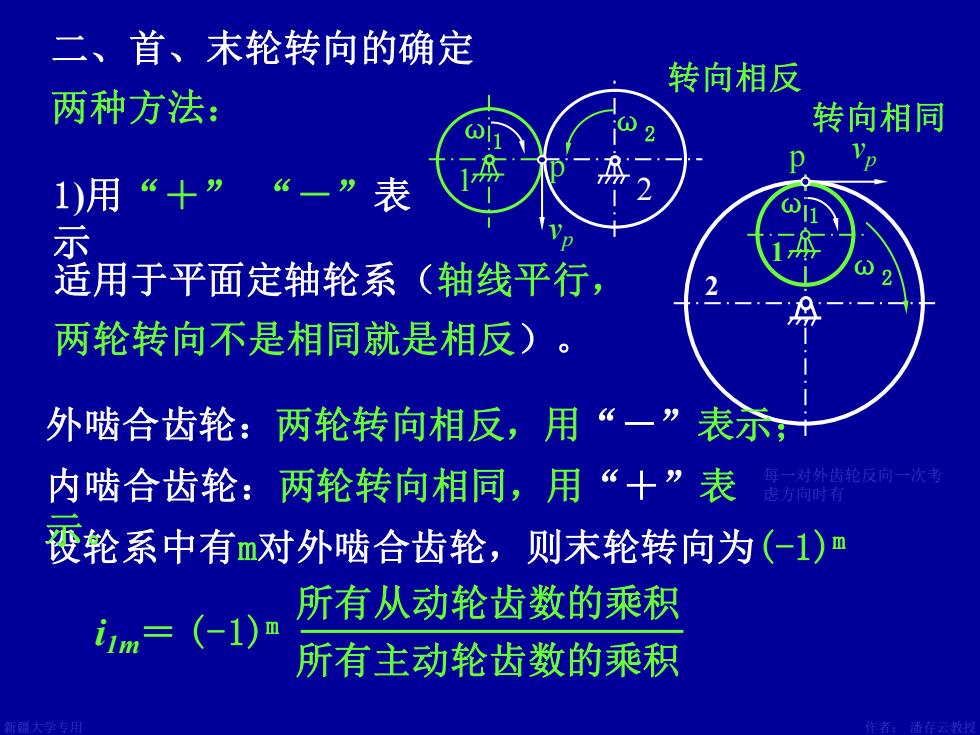
二、首、末轮转向的确定 转向相反 两种方法: 转向相同 1)用“十” “一”表 示 用于平面定轴轮系(轴线平行, 两轮转向不是相同就是相反) 外啮合齿轮:两轮转向相反,用“一”表示: 内啮合齿轮:两轮转向相同,用“十”表 年一对外齿轮反向一次南 虑方向时有 设轮系中有m对外啮合齿轮,则末轮转向为(-1) 所有从动轮齿数的乘积 im=(-1)n 所有主动轮齿数的乘积
新疆大学专用 作者: 潘存云教授 设计:潘存云 设计:潘存云 2 2 二、首、末轮转向的确定 设轮系中有m对外啮合齿轮,则末轮转向为(-1)m 1)用“+” “-”表 示 外啮合齿轮:两轮转向相反,用“-”表示; 两种方法: 适用于平面定轴轮系(轴线平行, 两轮转向不是相同就是相反)。 ω1 ω2 内啮合齿轮:两轮转向相同,用“+”表 示。 ω2 所有从动轮齿数的乘积 所有主动轮齿数的乘积 i1m= (-1)m 1 p vp 转向相反 转向相同 每一对外齿轮反向一次考 虑方向时有 ω1 1 p vp

2)画箭头 外啮合时:两箭头同时指向(或远离)啮合点。 头头相对或尾尾相对。 内啮合时:两箭头同向。 对于空间定轴轮系,只能用画箭头的方法来确定从 动轮的转向。 1)锥齿轮 解 作者:潘存云教型
新疆大学专用 作者: 潘存云教授 设计:潘存云 设计:潘存云 设计:潘存云 1 2 1 2 3 2)画箭头 外啮合时: 内啮合时: 对于空间定轴轮系,只能用画箭头的方法来确定从 动轮的转向。 两箭头同时指向(或远离)啮合点。 头头相对或尾尾相对。 两箭头同向。 1)锥齿轮 1 2