图解法 解析法 实验法 直观性强、简单易 行。对于某些设计 往往比解析法方便 有效,它是连杆机 构设计的一种基本 方法。设计精度低, 不同的设计要求, 图解的方法各异。 对于较复杂的设计 要求,图解法很难 解决。 解析法精度较 高,但计算量 大,目前由于 计算机及数值 计算方法的迅 速发展,解析 法已得到广泛 应用。 实验法通常用 于设计运动要 求比较复杂的 连杆机构,或 者用于对机构 进行初步设计。 设计时选用哪种方法,应视具体情况来决定
图解法 解析法 实验法 直观性强、简单易 行。对于某些设计 往往比解析法方便 有效,它是连杆机 构设计的一种基本 方法。设计精度低, 不同的设计要求, 图解的方法各异。 对于较复杂的设计 要求,图解法很难 解决。 解析法精度较 高,但计算量 大,目前由于 计算机及数值 计算方法的迅 速发展,解析 法已得到广泛 应用。 实验法通常用 于设计运动要 求比较复杂的 连杆机构,或 者用于对机构 进行初步设计。 设计时选用哪种方法,应视具体情况来决定
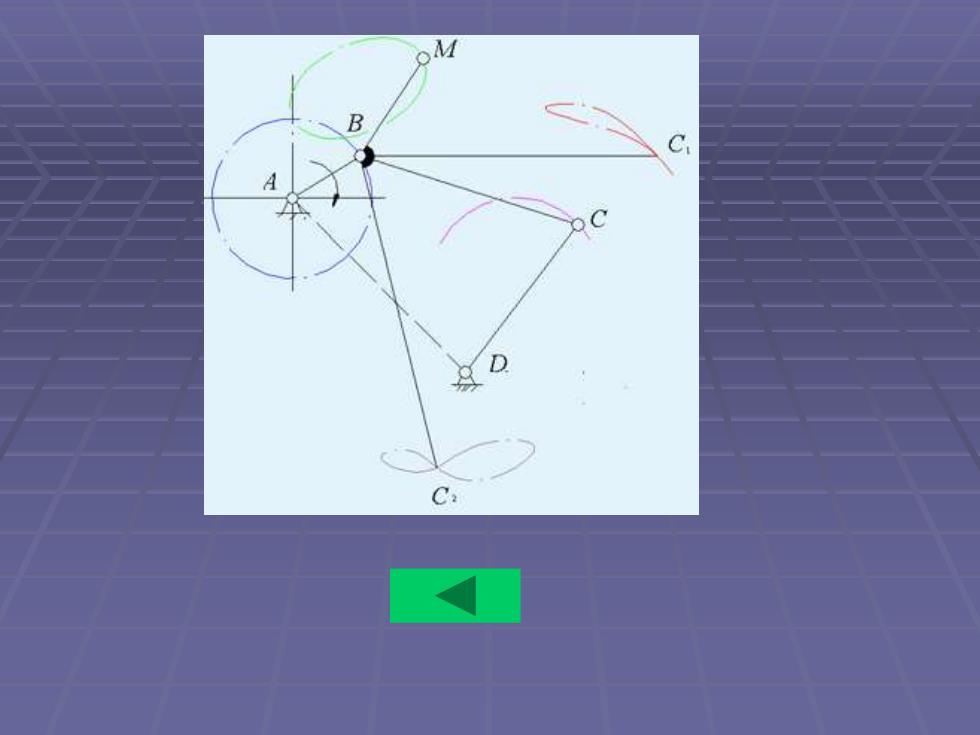
B C C
§3-2 平面四杆机构的基本型 式及其演化
§3-2 平面四杆机构的基本型 式及其演化

一、铰链四杆机构 在平面连杆机构中,结构最简单的且应用最 广泛的是由4个构件所组成的平面四杆机构, 其它多杆机构可看成在此基础上依次增加 杆组而组成。 在平面四杆机构中最基本的是铰链四杆机构, 它可以演化成其它形式的四杆机构 铰链四杆机构: 所有运动副均为转动副的四 杆机构称为铰链四杆机构
一、铰链四杆机构 在平面连杆机构中,结构最简单的且应用最 广泛的是由4个构件所组成的平面四杆机构, 其它多杆机构可看成在此基础上依次增加 杆组而组成。 在平面四杆机构中最基本的是铰链四杆机构, 它可以演化成其它形式的四杆机构 铰链四杆机构: 所有运动副均为转动副的四 杆机构称为铰链四杆机构
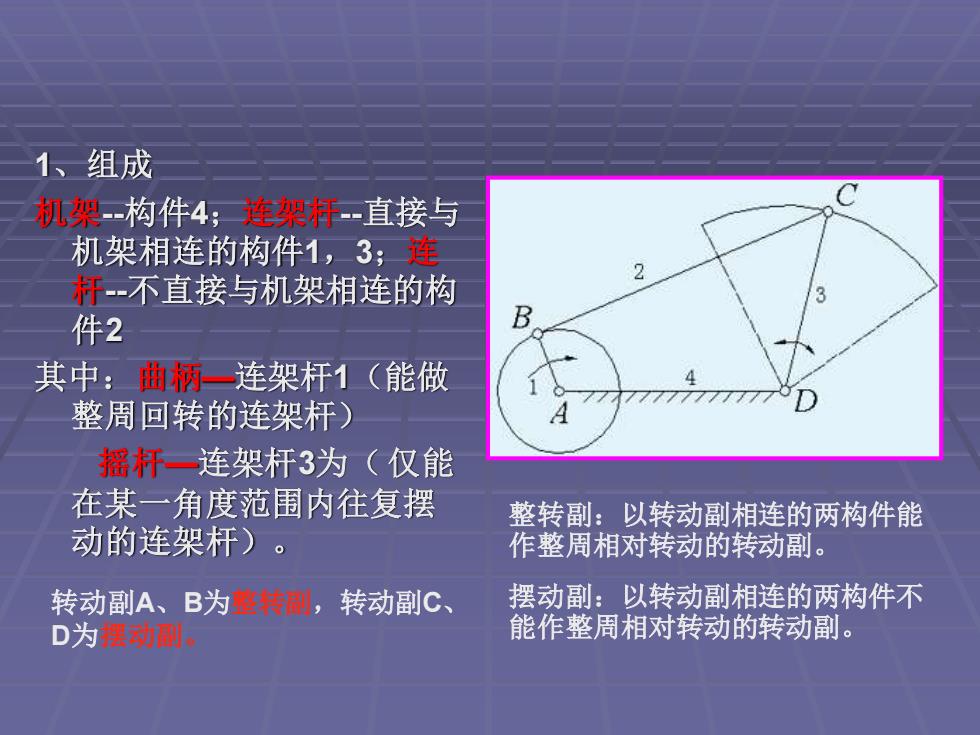
1、组成 机架-构件4;连架杆-直接与 机架相连的构件1,3;连 杆-不直接与机架相连的构 件2 其中:曲柄—连架杆1(能做 整周回转的连架杆) 摇杆—连架杆3为( 仅能 在某一角度范围内往复摆 动的连架杆)。 转动副A、B为整转副,转动副C、 D为摆动副。 整转副:以转动副相连的两构件能 作整周相对转动的转动副。 摆动副:以转动副相连的两构件不 能作整周相对转动的转动副
1、组成 机架-构件4;连架杆-直接与 机架相连的构件1,3;连 杆-不直接与机架相连的构 件2 其中:曲柄—连架杆1(能做 整周回转的连架杆) 摇杆—连架杆3为( 仅能 在某一角度范围内往复摆 动的连架杆)。 转动副A、B为整转副,转动副C、 D为摆动副。 整转副:以转动副相连的两构件能 作整周相对转动的转动副。 摆动副:以转动副相连的两构件不 能作整周相对转动的转动副