物 蒙古科技大学教案 材料与冶金学院李振亮 课程名称:《材料成型控制工程基础》(第1章,共11章) 编写时间:2010年8月28日 1概述 授课章节 1.1生产过程自动化发展概况12过程控制的要求和任务1.3过程控制系统的组成和分类 1.4过程控制系统的性能指标1.5自控控制技术在材料成形领域中的应用 目的要求 控制理论与过程控制的区别:过程控制的定义、组成、分类、特点及性能指标:了解自动控 制理论在材料成形领域中的应用。 重点:控制理论与过程控制的区别 重点难点 难点:过程控制系统的性能指标
1 内 蒙 古 科 技 大 学 教 案 材 料 与 冶 金 学 院 李 振 亮 课程名称:《材料成型控制工程基础》 (第 1 章,共 11 章) 编写时间:2010 年 8 月 28 日 授课章节 1 概述 1.1 生产过程自动化发展概况 1.2 过程控制的要求和任务 1.3 过程控制系统的组成和分类 1.4 过程控制系统的性能指标 1.5 自控控制技术在材料成形领域中的应用 1.2 自动控制理论在材料成型中的应用 目的要求 控制理论与过程控制的区别;过程控制的定义、组成、分类、特点及性能指标;了解自动控 制理论在材料成形领域中的应用。 重点难点 重点:控制理论与过程控制的区别 难点:过程控制系统的性能指标

第1章概述 类比 1.1生产过程自动化的发展概况 引入新课 (约5分钟 自动化在生产中的应用,大致经历了三个发展阶段。 第一阶段:上世起0年代以煎。 这一时期的自控理论为经典控制理论,其特点是:研究主要对象是单入、单输出线性 (约20分钟, 定常反馈系统:数学基础是拉普斯特变换:系统的数学模型以传递函数为主:系统的设计 分析法基于频率法和图解法(即根轨迹法) 20世纪40一60年代是经典控制理论的发展与成熟阶段,古典控策略主要包括PID控制 Smi油控制和解耦控制,目前9O%的工业控制回路仍采用各种形式的PID控制。 第二阶段:上世纪60年代。 50年代后期,贝尔曼(Bellman)等人提出使用状态空间法。于1960年前后开始形成现代 控制理论。1960年卡尔曼(Kalman)在控制系统的研究中成功地应用了状态空间法,并提 出了可控性与可观测性的概念,这使现代控制理论在六十年代迅速发展起来 它适用于多输入一多输出、时变参数、分布参数、随机参数、非线性等复杂控制系统 的分析设计:以状态空间法为数学模型,数学基础是矩阵理论,研究主要内容包括:线性 系统分析、系统的稳定性、极大值原理与最优控制、卡尔曼滤波和系统辨识第。 目前,国内外在空间技术、飞行控制系统设计以及工业生产等方面已广泛采用现代控 制理论,其主要控制策略有自适应控制和变结构控制。 第三阶段:上世纪8即年代末。 随着计算机的发展与社会对工业控制的不断需求,出现了智能控制策略。它主要以智 能控制理论为指导,其典型控制策略有:神经网铬、专家系统、模糊控制系统等。 控制理论和控制工程的区别见下图 内蒙古科技大学教案
2 第 1 章 概 述 1.1 生产过程自动化的发展概况 自动化在生产中的应用,大致经历了三个发展阶段。 第一阶段:上世纪 50 年代以前。 这一时期的自控理论为经典控制理论,其特点是:研究主要对象是单入、单输出线性 定常反馈系统;数学基础是拉普斯特变换;系统的数学模型以传递函数为主;系统的设计、 分析法基于频率法和图解法(即根轨迹法)。 20 世纪 40-60 年代是经典控制理论的发展与成熟阶段,古典控策略主要包括 PID 控制, Smith 控制和解耦控制,目前 90%的工业控制回路仍采用各种形式的 PID 控制。 第二阶段:上世纪 60 年代。 50 年代后期,贝尔曼(Bellman)等人提出使用状态空间法。于 1960 年前后开始形成现代 控制理论。1960 年卡尔曼(Kalman)在控制系统的研究中成功地应用了状态空间法,并提 出了可控性与可观测性的概念,这使现代控制理论在六十年代迅速发展起来。 它适用于多输入-多输出、时变参数、分布参数、随机参数、非线性等复杂控制系统 的分析设计;以状态空间法为数学模型,数学基础是矩阵理论,研究主要内容包括:线性 系统分析、系统的稳定性、极大值原理与最优控制、卡尔曼滤波和系统辨识等。 目前,国内外在空间技术、飞行控制系统设计以及工业生产等方面已广泛采用现代控 制理论,其主要控制策略有自适应控制和变结构控制。 第三阶段:上世纪 80 年代末。 随着计算机的发展与社会对工业控制的不断需求,出现了智能控制策略。它主要以智 能控制理论为指导,其典型控制策略有:神经网络、专家系统、模糊控制系统等。 控制理论和控制工程的区别见下图 类比 引入新课 (约 5 分钟) (约 20 分钟) 内 蒙 古 科 技 大 学 教 案

三想 回→ 雾 的整体思路是 重在理解二者 区别) 5分钟 内蒙古科技大学教案
3 (重点,该图 的整体思路是 重在理解二者 区别) 5 分钟 内 蒙 古 科 技 大 学 教 案
1.2过程控制的要求和任务 (约 5分 工业生产对过程控制的要求是多方面的,最终可以归纳为三项要求,即安全性、经济性和稳定性 (1)安全性 指在整个生产过程叶 确保人身和设备的安全,这是最重要的 ,也是最基本的要求 钟) 通常采用参数越限报警,事故报警和联锁保护措施来保证生产过程的安全性。另外,在现代故障预测与 诊断、容错控制等对日益连续化和大型化的工业企业的安全性也有很大的作用。 (2)稳定性一一指系统抑制外部干扰,保持生产过程长期稳定运行的能力。变化的(特别是恶劣的) 工业运行环境、原料成分的变化、能源系统的波动均有可能影响生产过程的稳定性。在外部干扰下,过 程控制系统应该使生产过程参数与状态所产生的变化尽可能的小,以消除或减少外部干扰可能造成的不 良影响 (3)经济性一一在满足以上两个基本要求的基础上,低成本高效益是过程控制的另一个目标。为此, 不仅需要对过程控制系统进行优化设计,还需要管控一体化,即以经济效益为目标的整体优化。 13过程控制系统的组成和分类 1.3.1过程控制系统一般由以下几部分组成 (1)被控过程(或对象): (2)用于生产过程参数的检测与变送仪表: (3)控制器(或称调节器): 执行机构(若调节阀) 报警、保护和连锁等其它元件(部件)。 ⑧ (约 一控制器 执行机构一被挖过程0 检测和变送仪表 图1】过程控制系统基本结构图 13.2过程控制系统分类 过程控制系统有多种分类方法: ①按被控参数分类,可分为温度控制系统、压力控制系统、流量控制系统、液位或物位控制系统、 物理特性控制系统、化学成分控制系统: ①按被拉量数 类, 可分为单变量过程控制系统,多变量过程控制系统 ⊙按设定值分类,可分为定值控制系统、随动(伺服)控制系统: ④按参数性质分类,可分为集中参数控制系统、分布参数控制系统: ⊙按控制算法分类,可分为简单控制系统、复杂控制系统、先进或高级控制系统: ⑥按控制器形式分类,可分为常规仪表过程控制、计算机过程控制系统。 内 蒙古科技大学教案
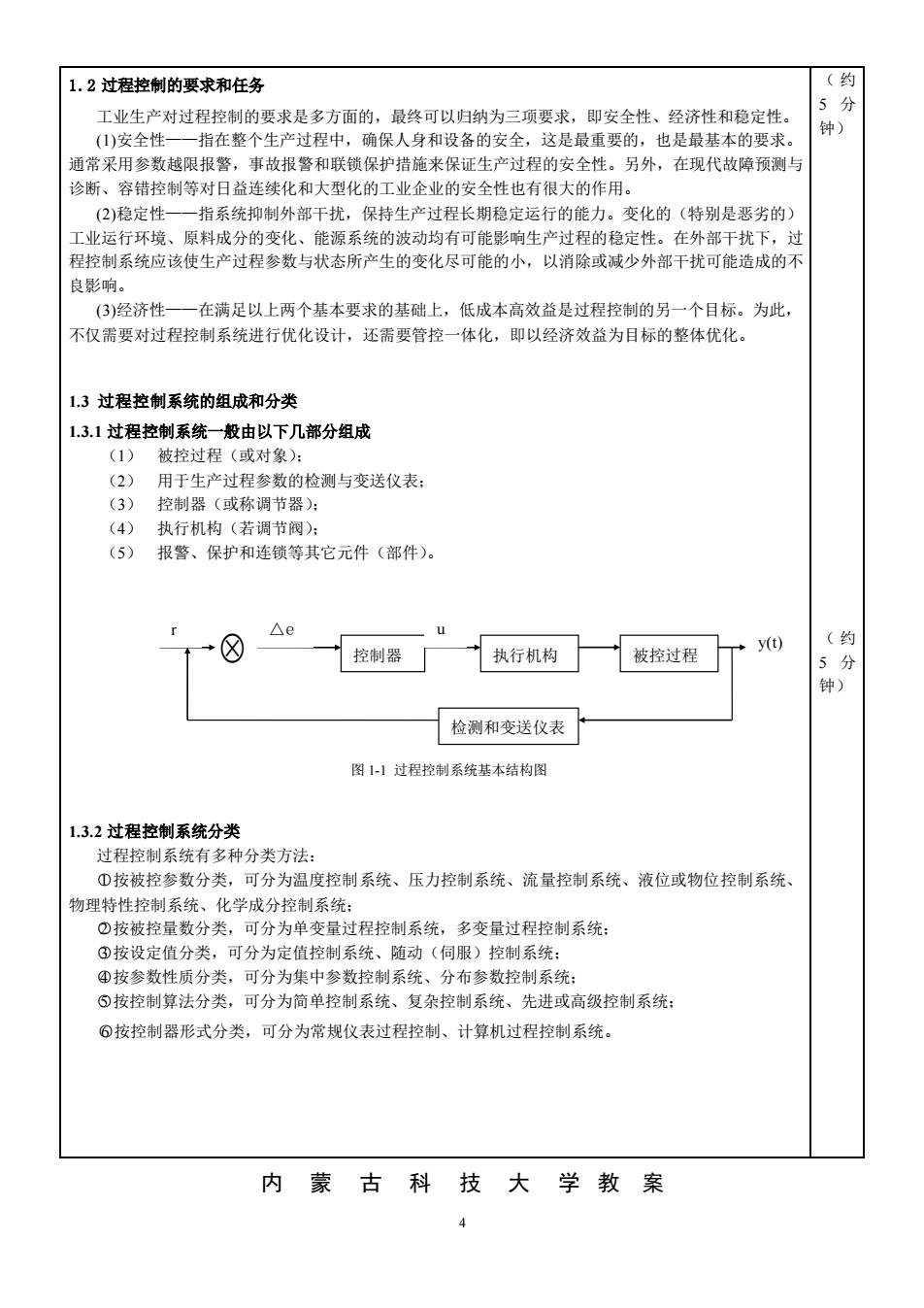
4 1.2 过程控制的要求和任务 工业生产对过程控制的要求是多方面的,最终可以归纳为三项要求,即安全性、经济性和稳定性。 (1)安全性——指在整个生产过程中,确保人身和设备的安全,这是最重要的,也是最基本的要求。 通常采用参数越限报警,事故报警和联锁保护措施来保证生产过程的安全性。另外,在现代故障预测与 诊断、容错控制等对日益连续化和大型化的工业企业的安全性也有很大的作用。 (2)稳定性——指系统抑制外部干扰,保持生产过程长期稳定运行的能力。变化的(特别是恶劣的) 工业运行环境、原料成分的变化、能源系统的波动均有可能影响生产过程的稳定性。在外部干扰下,过 程控制系统应该使生产过程参数与状态所产生的变化尽可能的小,以消除或减少外部干扰可能造成的不 良影响。 (3)经济性——在满足以上两个基本要求的基础上,低成本高效益是过程控制的另一个目标。为此, 不仅需要对过程控制系统进行优化设计,还需要管控一体化,即以经济效益为目标的整体优化。 1.3 过程控制系统的组成和分类 1.3.1 过程控制系统一般由以下几部分组成 (1) 被控过程(或对象); (2) 用于生产过程参数的检测与变送仪表; (3) 控制器(或称调节器); (4) 执行机构(若调节阀); (5) 报警、保护和连锁等其它元件(部件)。 图 1-1 过程控制系统基本结构图 1.3.2 过程控制系统分类 过程控制系统有多种分类方法: ○1 按被控参数分类,可分为温度控制系统、压力控制系统、流量控制系统、液位或物位控制系统、 物理特性控制系统、化学成分控制系统; ○2 按被控量数分类,可分为单变量过程控制系统,多变量过程控制系统; ○3 按设定值分类,可分为定值控制系统、随动(伺服)控制系统; ○4 按参数性质分类,可分为集中参数控制系统、分布参数控制系统; ○5 按控制算法分类,可分为简单控制系统、复杂控制系统、先进或高级控制系统; ○6 按控制器形式分类,可分为常规仪表过程控制、计算机过程控制系统。 ( 约 5 分 钟) ( 约 5 分 钟) 内 蒙 古 科 技 大 学 教 案 r y(t) 控制器 △e u 执行机构 被控过程 检测和变送仪表

1.4过程控制系统的性能指标 1.4.1稳态与动态 稳态1(平葡一坊作用 调节 动态过程 +稳态Ⅱ(平衡) (平衡破不 (排除干扰) (约5分钟) 1.4.2自动调节的过渣过程 自动调节系统动态中,被调参数随时间而变化的过程称为自动调节系统的调节过程或 过渡过程。亦即系统从一个平衡状态过渡到另一个平衡状态的过程(如图12)。 过1 →过液过程←平衡 →时间 图12系统的过渡过程 图13系统的过渡过程 (约5分钟) 图13系统的过渡过程 内蒙古科技大学教案
5 1.4 过程控制系统的性能指标 1.4.1 稳态与动态 1.4.2 自动调节的过渡过程 自动调节系统动态中,被调参数随时间而变化的过程称为自动调节系统的调节过程或 过渡过程。亦即系统从一个平衡状态过渡到另一个平衡状态的过程(如图 1-2)。 图 1-2 系统的过渡过程 图 1-3 系统的过渡过程 图 1-3 系统的过渡过程 (约 5 分钟) (约 5 分钟) 内 蒙 古 科 技 大 学 教 案