
内 蒙古科技大学教案 材料与冶金学院李振亮 课程名称:《材料成型控制工程基础》(第2章,共11章) 编写时间:2010年8月28日 2过程控制系统的动态数学模型 授课章节 2.1古典与现代控制理论研究方法2.2拉氏变换及反变换2.3传递函数 本章内容属于古典控制理论的研究范畴。传递函数是古典控制理论中描述系统的主要数学 目的要求 模型,之所以讲这一章,目的是为下一章PID控制器做基础准备。 本章主要思路是:拉氏变换→传递函数一典型环节一PD控制: 重点:传递函数定义、性质和等效变换等:典型环节 重点难点 难点:拉氏变化的概念及性质。 2过程控制系统的动态数学模型 2.1古典与现代控制理论研究方法 2.1.1数学模型的概念 为研究控制系统的动态性质,必须把系统输出和输入变量之间在动态情况下的相互 关系用数学方程的形式表示出来。描述系统动态性能的数学表达式叫系统的数学模型, 重点掌握数模 求取这一数学表达式的过程叫建模。 概念和分类 注意:(1)描述同一系统的数学模型,有完整、复杂数学模型和简单、准确性较差 的数学模型两类。建模中应在模型准确性和简化性之间折衷。不要盲目强调准确而过于 复杂,也不要片面强调简化而使分析结果与实际出入太大。一般允许条件下,开始尽可 能采用简化的线性、常系数、常微分方程形式的数学模型,如果有必要,再在上述简化 基础上考虑忽略因素所引起的偏差,建立较完善、准确的数学模型。(2)过程控制系统 数学模型有微分方程、传递函数、颊速特性、状态方程等多种形式。 2.1.2按照系统的数学模型对过程系统分类 按照系统的数学模型可将过程控制系统分成如下几类: (1)按照变量y)及其各阶导数的次数可将系统分为线性和非线性系统。 线性系统:系统的数学模型方程是线性的,如m心+C少+ky=0,这种系统就叫线性 系统,这种线性方程既可以是线性代数方程,线性差分方程,也可以是线性微分方程或 线性偏微分方程。线性系统又可分为: 1)线性定常系统:系统由定常集中参数元件组成,数学模型用线性微分方程描述。 例如:anya叶an-ly-l++ay-0,其中an,an-l.a0都是实常数,它 所指描述的系统就是线性定常系统。 2)线性时变系统:描述系统微分方程的系数也是时间的函数。例如: 少+k()y=0,其中k)表示系数k随时间t变化的函数关系,它所描述的系统则是 线性时变系统。 线性系统最重要特性是可用叠加原理
1 内 蒙 古 科 技 大 学 教 案 材 料 与 冶 金 学 院 李 振 亮 课程名称:《材料成型控制工程基础》 (第 2 章,共 11 章) 编写时间:2010 年 8 月 28 日 授课章节 2 过程控制系统的动态数学模型 2.1 古典与现代控制理论研究方法 2.2 拉氏变换及反变换 2.3 传递函数 目的要求 本章内容属于古典控制理论的研究范畴。传递函数是古典控制理论中描述系统的主要数学 模型,之所以讲这一章,目的是为下一章 PID 控制器做基础准备。 本章主要思路是:拉氏变换→传递函数→典型环节→PID 控制。 重点难点 重点:传递函数定义、性质和等效变换等;典型环节 难点:拉氏变化的概念及性质。 2 过程控制系统的动态数学模型 2.1 古典与现代控制理论研究方法 2.1.1 数学模型的概念 为研究控制系统的动态性质,必须把系统输出和输入变量之间在动态情况下的相互 关系用数学方程的形式表示出来。描述系统动态性能的数学表达式叫系统的数学模型, 求取这一数学表达式的过程叫建模。 注意:(1)描述同一系统的数学模型,有完整、复杂数学模型和简单、准确性较差 的数学模型两类。建模中应在模型准确性和简化性之间折衷。不要盲目强调准确而过于 复杂,也不要片面强调简化而使分析结果与实际出入太大。一般允许条件下,开始尽可 能采用简化的线性、常系数、常微分方程形式的数学模型,如果有必要,再在上述简化 基础上考虑忽略因素所引起的偏差,建立较完善﹑准确的数学模型。(2)过程控制系统 数学模型有微分方程、传递函数、频率特性、状态方程等多种形式。 2.1.2 按照系统的数学模型对过程系统分类 按照系统的数学模型可将过程控制系统分成如下几类: (1)按照变量 y(t)及其各阶导数的次数可将系统分为线性和非线性系统。 线性系统:系统的数学模型方程是线性的,如 m y + cy + ky = 0 ,这种系统就叫线性 系统,这种线性方程既可以是线性代数方程,线性差分方程,也可以是线性微分方程或 线性偏微分方程。线性系统又可分为: 1)线性定常系统:系统由定常集中参数元件组成,数学模型用线性微分方程描述。 例如: any (n)+an-1y (n-1)+.+a0y=0, 其中 an,an-1 .a0 都是实常数,它 所指描述的系统就是线性定常系统。 2 ) 线 性时 变 系统 : 描述 系统 微 分方 程 的系 数 也是 时 间的 函 数。 例 如 : y + k(t) y = 0 , 其中 k(t)表示系数 k 随时间 t 变化的函数关系,它所描述的系统则是 线性时变系统。 线性系统最重要特性是可用叠加原理。 非线性系统:系统的数学模型为非线性的,如: ,它所描述的系 统是非线性系统,其特性是不能应用叠加原理。 (2)根据 y 的自变量的个数为 1 还是大于 1,可将系统的微分方程分为常微分方程 和偏微分方程两种,它们所描述的系统又可分别称为集中参数系统和分布参数系统。 重点掌握数模 概念和分类

内蒙古科技大学教案 非线性系统:系统的数学模型为非线性的,如:+少+y2=0,它所描述的系统 是非线性系统,其特性是不能应用叠加原理。 (2)根据y的自变量的个数为1还是大于1,可将系统的微分方程分为常微分方程和 偏微分方程两种,它们所描述的系统又可分别称为集中参数系统和分布参数系统。 集中参教系统,系统的元件可用一个自变量来表示,自变量可以品时间、距离成其它 物理量。系统的动态特性(即数学模型)表现为常微分方程,如(1)中所示,都是集中参 数系 分布参数系统:系统的自变量除时间外,还有空间的变化,涉及一个以上的自变量。 系统的动态特性必须用偏微分方程来描述。如: a022+b002:9=l 0x2 所描述的系统则为分布参数系统。 (3)根据系统的数学模型是用连续的微分方程来描述,还是用离散的差分方程来描述, 可将系统分为连续型系统和离做型系统两种。前面的例子都是连续型系统:而用差分方程 )所描述的系统则是离散型,式中k表示采样的时间序列数。当应用计算机分析 设计系统时 ,特别是在进行实时控制时,需要将连续型系统化成离散型系统 (4)按照系统中的变量是确定的还是随机的,可将系统分为确定系统和随机系统。 (了解数模的 (5)按照系统的输入变量和输出变量个数是一个还是多个,可将系统分为单输入一单分类方法) 输出(SISO)系统和多输入一多输出(MIMO)系统。 对于古典控制理论而言,它多适用于研究单输入一单输出集中参数连续型线性定常 系统:而现代控制理论则可用于上述各种型式的复杂系统 此外,在过程控制系统中还要了解“增量方程”的概念 2.1.3不同控制理论的研究方法 (1)古典控制理论的研究方法,其研究方法是传递函数法。不论是采用频率响应法还 是根轨迹法,其数学模型都是传递函数,都是在复数域内研究系统的。 自动控制的过程本来总是和时间相联系的,因此系统运动规律的最基本描述方式就是 微分方程及其在时域的解。但是,由于用古典的方法来解微分方程较为复杂,故采用了拉 普拉斯变换这种数学工具,因而才引入了传递函数及其一整套的研究方法, 研究方法由时间域进入复数域,从而形成了古典控制理论。 (2)现代控制理论的研究方法,其研究方法是状态空间法。状态空间法的实质就是在 重点(考点) 建立控制系统的数学模型时,先将系统的运动方程写成一阶微分方程组的形式,进而再将 一阶微分方程组写成矩阵方程(状态方程形式),在此基础上再进行所需要的各种研究,这 样就简化了数学符号,方便了运算。现代控制理论的所有优越性都是由于采用了状态空间 法这一研究方法而得到的。 研究方法的改变导致了控制论发展进程的飞跃。由于在复数域内研究系统有很大的局 限性,这就要求能够直接在时间域内对控制系统进行研究。 研究方法从复数域又回到时间域就形成了现代控制理论。认真地把握古典和现代控制 理论的研究方法,是学习和应用现代控制理论的关键。 2.2拉氏变换及反变换
2 内 蒙 古 科 技 大 学 教 案 非线性系统:系统的数学模型为非线性的,如: 0 2 y + yy + y = ,它所描述的系统 是非线性系统,其特性是不能应用叠加原理。 (2)根据 y 的自变量的个数为 1 还是大于 1,可将系统的微分方程分为常微分方程和 偏微分方程两种,它们所描述的系统又可分别称为集中参数系统和分布参数系统。 集中参数系统:系统的元件可用一个自变量来表示,自变量可以是时间、距离或其它 物理量。系统的动态特性(即数学模型)表现为常微分方程,如(1)中所示,都是集中参 数系统。 分布参数系统:系统的自变量除时间外,还有空间的变化,涉及一个以上的自变量。 系统的动态特性必须用偏微分方程来描述。如: ( ) ( , ) ( ) ( , ) ( ) 2 2 2 2 u x x y t x b t t y t x a x = + 所描述的系统则为分布参数系统。 (3)根据系统的数学模型是用连续的微分方程来描述,还是用离散的差分方程来描述, 可将系统分为连续型系统和离散型系统两种。前面的例子都是连续型系统;而用差分方程 x(k+1)=ax(k)所描述的系统则是离散型,式中 k 表示采样的时间序列数。当应用计算机分析、 设计系统时,特别是在进行实时控制时,需要将连续型系统化成离散型系统。 (4)按照系统中的变量是确定的还是随机的,可将系统分为确定系统和随机系统。 (5)按照系统的输入变量和输出变量个数是一个还是多个,可将系统分为单输入—单 输出(SISO)系统和多输入—多输出(MIMO)系统。 对于古典控制理论而言,它多适用于研究单输入—单输出集中参数连续型线性定常 系统;而现代控制理论则可用于上述各种型式的复杂系统。 此外,在过程控制系统中还要了解“增量方程”的概念 2.1.3 不同控制理论的研究方法 (1)古典控制理论的研究方法,其研究方法是传递函数法。不论是采用频率响应法还 是根轨迹法,其数学模型都是传递函数,都是在复数域内研究系统的。 自动控制的过程本来总是和时间相联系的,因此系统运动规律的最基本描述方式就是 微分方程及其在时域的解。但是,由于用古典的方法来解微分方程较为复杂,故采用了拉 普拉斯变换这种数学工具,因而才引入了传递函数及其一整套的研究方法。 研究方法由时间域进入复数域,从而形成了古典控制理论。 (2)现代控制理论的研究方法,其研究方法是状态空间法。状态空间法的实质就是在 建立控制系统的数学模型时,先将系统的运动方程写成一阶微分方程组的形式,进而再将 一阶微分方程组写成矩阵方程(状态方程形式),在此基础上再进行所需要的各种研究,这 样就简化了数学符号,方便了运算。现代控制理论的所有优越性都是由于采用了状态空间 法这一研究方法而得到的。 研究方法的改变导致了控制论发展进程的飞跃。由于在复数域内研究系统有很大的局 限性,这就要求能够直接在时间域内对控制系统进行研究。 研究方法从复数域又回到时间域就形成了现代控制理论。认真地把握古典和现代控制 理论的研究方法,是学习和应用现代控制理论的关键。 2.2 拉氏变换及反变换 (了解数模的 分类方法) 重点(考点)
内蒙古科技大学教案 利用拉氏变换可将微分方程转换为代数方程,使求解的过程大为简化,故拉氏变换成为分析过 把引入 程控制系统中的基本数学方法之 在此基础上可以进一步求出系统的传递函数。 拉代变 我们使用拉氏变换的目的,不仅仅是为求解微分方程,更主要的是用它去直接分析系统及其组 化的背 成环节的特性,特别是在引入传递函数及频率特性的概念之后,就可以不必求解微分方程,而利用 景交代 变换所得的函数省接去研究系统的动态特性。 清楚 这一节中,对于拉普拉斯变换的定义、性质及反变化的相关内容,我们主要不是从数学角度而 是从工程应用的目的来讨论这一问题。 2.2.1拉氏变换定义 设定0是定义在(0,o)区间上的时间函数,又s为复数(s+jo)(o读sgma),用c乘0 后,再将它对1从0到四进行积分,如果这个积分收敛,则这个积分便确定了一个以s为参量的 复变函数F(s),并记为: F(s)= f()e-st dr (2-1) 掌握 这种通过积分运算,将一个已知的时变函数),变换成另一个复变函数F(s)的方法,称为拉普 拉斯(LaPlace)变换,并用“L”表示,即 f(=[f(t)e-st di=F(s (2-2) 其中阳称为原函数,变换后所得的函数F(S)称为象函数,s称为拉普拉斯算子。一般以小写表 示“原函数”,大写表示“象函数 2.2.2常用函数的拉氏变换 表21工程中最常用原函数及拉氏变换对表 原函数 会定函数名称 象数 0≤1≤ 单位脉冲函数 △(s)=1 0 1<0,> 0 1<0 单位阶跃函数 (s)= 120 0 1<0 (考点) 1≥0 单位斜坡函数 该部分 讲推 t<0 正弦函数 只讲结 论,过程 0 1<0 学生下 余技函数 t2( 课自己 )= 0 120 的幕函数 注意:为了使用方便要象记住特别角的三角函数事样将他们记住
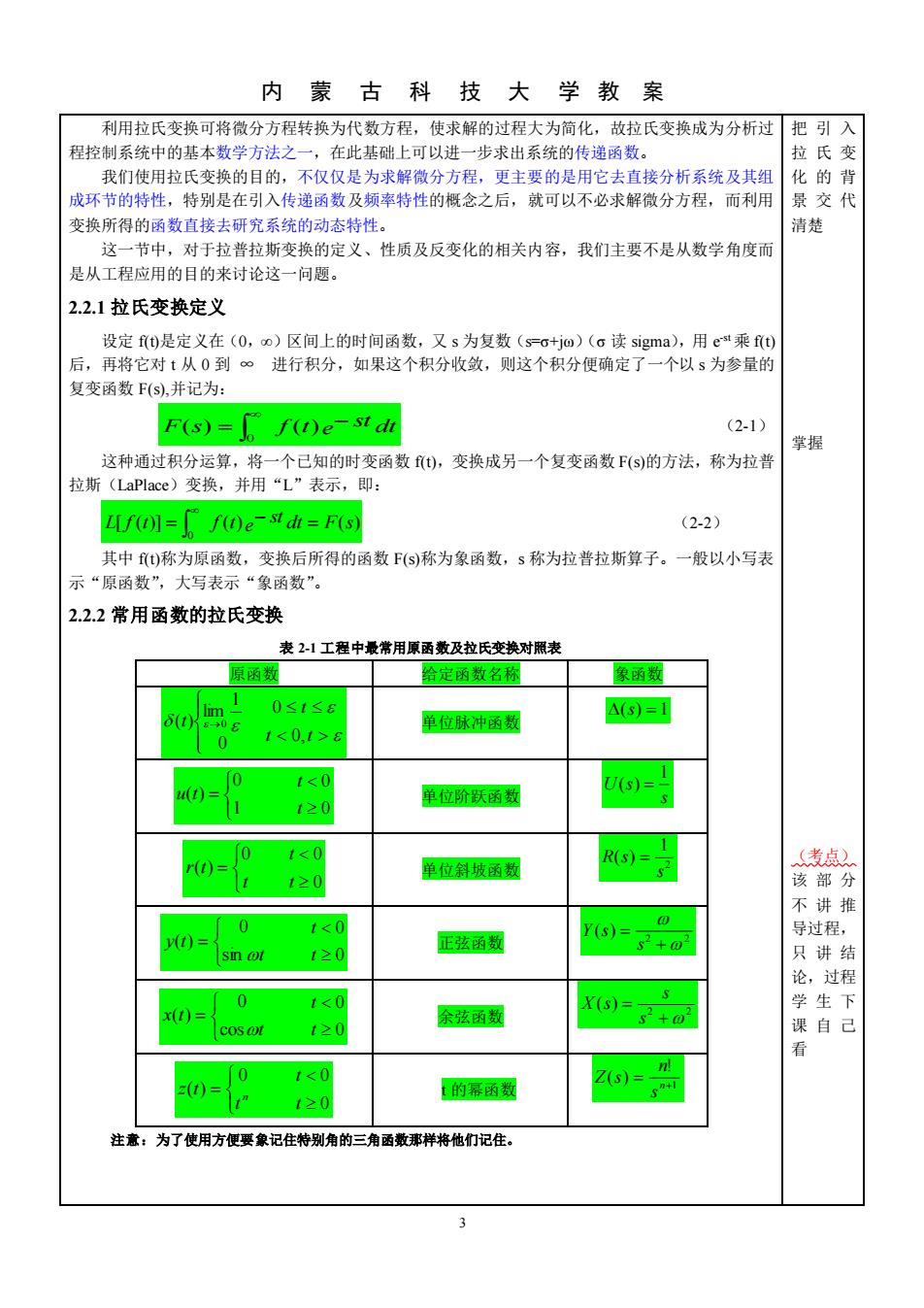
3 内 蒙 古 科 技 大 学 教 案 利用拉氏变换可将微分方程转换为代数方程,使求解的过程大为简化,故拉氏变换成为分析过 程控制系统中的基本数学方法之一,在此基础上可以进一步求出系统的传递函数。 我们使用拉氏变换的目的,不仅仅是为求解微分方程,更主要的是用它去直接分析系统及其组 成环节的特性,特别是在引入传递函数及频率特性的概念之后,就可以不必求解微分方程,而利用 变换所得的函数直接去研究系统的动态特性。 这一节中,对于拉普拉斯变换的定义、性质及反变化的相关内容,我们主要不是从数学角度而 是从工程应用的目的来讨论这一问题。 2.2.1 拉氏变换定义 设定 f(t)是定义在(0,∞)区间上的时间函数,又 s 为复数(s=σ+jω)(σ 读 sigma),用 e -st 乘 f(t) 后,再将它对 t 从 0 到 ∞ 进行积分,如果这个积分收敛,则这个积分便确定了一个以 s 为参量的 复变函数 F(s),并记为: e dt st F s = f t − ( ) ( ) 0 (2-1) 这种通过积分运算,将一个已知的时变函数 f(t),变换成另一个复变函数 F(s)的方法,称为拉普 拉斯(LaPlace)变换,并用“L”表示,即: [ ( )] ( ) ( ) 0 e dt F s st L f t f t = − = (2-2) 其中 f(t)称为原函数,变换后所得的函数 F(s)称为象函数,s 称为拉普拉斯算子。一般以小写表 示“原函数”,大写表示“象函数”。 2.2.2 常用函数的拉氏变换 表 2-1 工程中最常用原函数及拉氏变换对照表 原函数 给定函数名称 象函数 → 0 1 lim ( ) 0 t t t t 0, 0 单位脉冲函数 (s) = 1 = 1 0 u(t) 0 0 t t 单位阶跃函数 s U s 1 ( ) = = t r t 0 ( ) 0 0 t t 单位斜坡函数 2 1 ( ) s R s = = t y t sin 0 ( ) 0 0 t t 正弦函数 2 2 ( ) + = s Y s = t x t cos 0 ( ) 0 0 t t 余弦函数 2 2 ( ) + = s s X s = n t z t 0 ( ) 0 0 t t t 的幂函数 1 ! ( ) + = n s n Z s 注意:为了使用方便要象记住特别角的三角函数那样将他们记住。 把引入 拉氏变 化的背 景交代 清楚 掌握 (考点) 该部分 不 讲 推 导过程, 只讲结 论,过程 学生下 课 自 己 看

内蒙古科技大学教案 2.2.3拉氏变换的基本性质 下面几条主要运算定理,是阐明拉氏变换性质的,只有掌握了这些定理才能 发挥拉氏变换的作用。 )线性定理 线性定理由齐次性和迭加性组成,可表示为: 若Laf1=4·Fs,af0=aEs 则Laf0±af0=a·F(s)±a,:E(s(2-9) 利用这一性质,就可在求由多项组成的微分方程的拉氏变换时,用逐项求拉 氏变换后再求和的形式来解决。 (2)微分定理 如果L/0=Fg,那么L9]=s·F6-02-10 式中0一函数的初始值,如果原在0时有跃变,则为跃变前之值。 这酰是说,函数0之一阶导数的拉氏变换,等于该函数的象函数和拉 dt 氏算子s的乘积与函数的初始值之差。 微分定理说明,若∫】=F(s),且在)及各阶导数的初始值皆为零的 情况下有: =s2F( d"f(=s".F(s dt" 这就是说,在时域内对原函数每进行一次微分,就相当于在复域内将象函数 用s乘一次:即将时域内的微分运算简化为复域内乘以s的运算(用s代 ,.s代替 d d ,这正是拉氏变换的奥妙所在。 (3)积分定理 若=F(s) (2-11) 式中f(0)=f)dl-0
4 内 蒙 古 科 技 大 学 教 案 2.2.3 拉氏变换的基本性质 下面几条主要运算定理,是阐明拉氏变换性质的,只有掌握了这些定理才能 发挥拉氏变换的作用。 (1)线性定理 线性定理由齐次性和迭加性组成,可表示为: 若 [ ( )] ( ) 1 1 1 1 L a f t = a F s , [ ( )] ( ) 2 2 2 2 L a f t = a F s 则 [ ( ) ( )] ( ) ( ) 1 1 2 2 1 1 2 2 L a f t a f t = a F s a F s (2-9) 利用这一性质,就可在求由多项组成的微分方程的拉氏变换时,用逐项求拉 氏变换后再求和的形式来解决。 (2)微分定理 如果 L[ f (t)] = F(s) ,那么 ] ( ) (0) ( ) [ s F s f dt df t L = − (2-10) 式中 f(0) ——函数的初始值,如果原函数在 t=0 时有跃变,则为跃变前之值。 这就是说,函数 f(t)之一阶导数 dt df (t) 的拉氏变换,等于该函数的象函数和拉 氏算子 s 的乘积与函数的初始值之差。 微分定理说明,若 L[ f (t)] = F(s) ,且在 f(t)及各阶导数的初始值皆为零的 情况下有: ] ( ) ( ) [ ] ( ) ( ) [ ] ( ) ( ) [ 2 2 2 s F s dt d f t L s F s dt d f t L s F s dt df t L n n n = = = 这就是说,在时域内对原函数每进行一次微分,就相当于在复域内将象函数 用 s 乘一次;即将时域内的微分运算简化为复域内乘以 s 的运算(用 s 代替 , dt d s n 代替 n n dt d ),这正是拉氏变换的奥妙所在。 (3)积分定理 若 L[ f (t)] = F(s),则 (0) 1 ( ) 1 [ ( ) ] −1 = + f s F s s L f t dt (2-11) 式中 0 1 (0) ( ) | = − = dt t f f t

内蒙古科技大学教案 积分定理说明,如果Lf()=F(s),且在)即其各重的积分初始值均为零的条件 下,有 /=Fo (重点,该部 利用这个性质,就可以用上代替∫d,二代替∫,这就是说,对 分是考点) 原函数每进行一次积分,就相当于它的象函数用s来除一次,这样把时域中的积分运算化 为复域内除以s的运算。 上述的线株定理、积朵定理和德分定理Pmn0ione mte-Differential)是拉氏变换 的核心,有了它们就能把求解微分方程的运算简化为求解一般代数方程的运算。 (4复域中的位移定理(又称“第一平移定理”) 若/0=Fs,则e"fj=F(a+s) (2-12) (⑤)时域中的位移定理(又称“延迟定理”或“第 平移定理”) 若/=F(s,则ft-r川=er·F(s (2-13) 此定理说明,时间函数f0通过t的平移,相当于拉氏变换乘因子e”,有了它就可 以帮助我们较容易地处理各种延迟环节。 (6相似定理(又称“时间尺度定理”) 若f=F(s) 则Uf】=aF(as) (2-14) 时间尺度定理说明,如果原函数)在时间上压缩成为侧,则其拉氏变换在复平面 上按α倍数展宽。反之,如果原函数展宽,则其拉氏变换压缩。 ()初值定理 若f0=F(s)则mf)=msF(s)=fO) (2-15 初值定理用来根据象函数求出原函数在t=0时的初始值。 (8)终值定理 若/】=Fs),则mf=msF(s) (2-16 终值定理用来直接根据象函数求原函数在1→时的稳态值(即终值),而不必知道) 的表达式是什么
5 内 蒙 古 科 技 大 学 教 案 积分定理说明,如果 L[ f (t)] = F(s) ,且在 f(t)即其各重的积分初始值均为零的条件 下,有 ( ) 1 [ ( ) ] ( ) 1 [ ( ) ] ( ) 1 [ ( ) ] ( ) 2 2 F s s L f t dt F s s L f t dt F s s L f t dt n n n = = = 利用这个性质,就可以用 s 1 代替 dt ,., n s 1 代替 ( ) ( ) n n dt ,这就是说,对 原函数每进行一次积分,就相当于它的象函数用 s 来除一次,这样把时域中的积分运算化 为复域内除以 s 的运算。 上述的线性定理、积分定理和微分定理(Propotional-Integrate-Differential)是拉氏变换 的核心,有了它们就能把求解微分方程的运算简化为求解一般代数方程的运算。 (4)复域中的位移定理(又称“第一平移定理”) 若 L[ f (t)] = F(s) ,则 L[e f (t)] F( s) t = + − (2-12) (5)时域中的位移定理(又称“延迟定理”或“第二平移定理”) 若 L[ f (t)] = F(s) ,则 L[ f (t )] e F(s) s − = − (2-13) 此定理说明,时间函数 f(t) 通过τ的平移,相当于拉氏变换乘因子 s e − ,有了它就可 以帮助我们较容易地处理各种延迟环节。 (6)相似定理(又称“时间尺度定理”) 若 L[ f (t)] = F(s) ,则 [ ( )] F( s) t L f = (2-14) 时间尺度定理说明,如果原函数 f(t)在时间上压缩成为 f(t/α) ,则其拉氏变换在复平面 上按 α 倍数展宽。反之,如果原函数展宽,则其拉氏变换压缩。 (7)初值定理 若 L[ f (t)] = F(s),则 lim ( ) lim ( ) (0) 0 f t s F s f t s = = → → (2-15) 初值定理用来根据象函数求出原函数在 t=0 时的初始值。 (8)终值定理 若 L[ f (t)] = F(s) ,则 lim ( ) lim ( ) 0 f t s F s t s = → → (2-16) 终值定理用来直接根据象函数求原函数在 t → 时的稳态值(即终值),而不必知道 f(t) 的表达式是什么。 (重点,该部 分是考点)