
内 蒙古科技大学教案 材料与冶金学院李振亮 课程名称:《材料成型控制工程基础》(第3章,共11章) 编写时间:2010年8月29日 3.PD控制及其调节过程 授课章节 3.1PID控制概述3.2PID调节规律3.3PID调节规律对系统过渡过程的影响 3.4PD调节器参数的工程整定3.5加热炉PD温度控制的MATLAB仿真 目的要求 本章内容属于古典控制策略的研究范球,主要介绍PD控制器的特点、调节规律,调节规 律对系统动态过程的影响,以及如何对PID控制器中的参数进行整定等内容。 重点:①ID控制的优点。②比例带的概念及其对调节过程的影响。③不同调节规律的特 重点难点 点。④调节器中不同调节作用的曲线比较。 难点:⑤PID控制器的参数整定。 3.PID控制及其调节过程 3.1PD控制概述 在PD调节规律基础上发展出的PD控制是古典控制策略的一种,其控制原理是 种负反馈控制。 PID( ona ntegrate-)控制是比例、积分、微分控制的简称。上个 世纪40年代以前,在工业生产过程控制中,除了最简单的开关控制外,它是唯一的控制 掌握(考点) 方式。从20世纪50年代开始,PID控制开始应用,并在模拟控制和数字控制系统中已 形成了成熟的算法。据介绍,直到现在90%以上的工业控制回路仍采用各种形式的PD 控制。 PD控制之所以应用数十年而未被淘汰,是因为它具有一系列优良的性质: ()原理简单,使用方便。PD控制由P、【、D三个环节的不同组合而成,其基本组 成原理比较简单,参数的物理意义比较明确。 PID算法整合了系统动态过程中的过去、现在和将来的信息。其中比例(P)代表当 前的信息,起纠正偏差的作用,使被控系统反应迅速:积分()代表过去积累的信息, 只有通过积分作用,才能消除系统的静态误差,改善系统的静态特性:微分(D)代表 对系统将来的预测信息,在信号变化时有超前控制作用,有利于减小超调、克服振荡、 加快系统的过渡过程。 (2)适应性强。可广泛应用于化工、热工、治金、炼油及造纸和建材等各种生产部门 按PD控制原理进行工作的自动调节器早已商品化,在具体实现上它们经历了机械式、 液动式、气动式、电子式等发展过程,但始终没有脱离PID控制的范畴。即使目前最新 式的过程控制计算机,其基本控制功能也仍然是PD控制。 (3)鲁棒性(robustness)强,其控制品质对被控对象的变化不太敏感,非常适用于环 境恶劣的工业生产现场。所谓鲁棒性,指在存在扰动和未建模动态条件下,也就是系统 的实际动态与应用数学模型之间误差较大时,系统仍能保持稳定性,基本维持原有设计 中控制性能的能力。 它的研究可以从“稳定鲁棒性”和“性能鲁棒性”两方面来区分
1 内 蒙 古 科 技 大 学 教 案 材 料 与 冶 金 学 院 李 振 亮 课程名称:《材料成型控制工程基础》 (第 3 章,共 11 章) 编写时间:2010 年 8 月 29 日 授课章节 3. PID 控制及其调节过程 3.1 PID 控制概述 3.2 PID 调节规律 3.3 PID 调节规律对系统过渡过程的影响 3.4 PID 调节器参数的工程整定 3.5 加热炉 PID 温度控制的 MATLAB 仿真 目的要求 本章内容属于古典控制策略的研究范畴,主要介绍 PID 控制器的特点、调节规律,调节规 律对系统动态过程的影响,以及如何对 PID 控制器中的参数进行整定等内容。 重点难点 重点: ①PID 控制的优点。②比例带的概念及其对调节过程的影响。③不同调节规律的特 点。④调节器中不同调节作用的曲线比较。 难点: ⑤PID 控制器的参数整定。 3. PID 控制及其调节过程 3.1 PID 控制概述 在 PID 调节规律基础上发展出的 PID 控制是古典控制策略的一种,其控制原理是一 种负反馈控制。 PID(proportional-integrate-differential)控制是比例、积分、微分控制的简称。上个 世纪 40 年代以前,在工业生产过程控制中,除了最简单的开关控制外,它是唯一的控制 方式。从 20 世纪 50 年代开始,PID 控制开始应用,并在模拟控制和数字控制系统中已 形成了成熟的算法。据介绍,直到现在 90%以上的工业控制回路仍采用各种形式的 PID 控制。 PID 控制之所以应用数十年而未被淘汰,是因为它具有一系列优良的性质: (1)原理简单,使用方便。PID 控制由 P、I、D 三个环节的不同组合而成,其基本组 成原理比较简单,参数的物理意义比较明确。 PID 算法整合了系统动态过程中的过去、现在和将来的信息。其中比例(P)代表当 前的信息,起纠正偏差的作用,使被控系统反应迅速;积分(I)代表过去积累的信息, 只有通过积分作用,才能消除系统的静态误差,改善系统的静态特性;微分(D)代表 对系统将来的预测信息,在信号变化时有超前控制作用,有利于减小超调、克服振荡、 加快系统的过渡过程。 (2)适应性强。可广泛应用于化工、热工、冶金、炼油及造纸和建材等各种生产部门。 按 PID 控制原理进行工作的自动调节器早已商品化,在具体实现上它们经历了机械式、 液动式、气动式、电子式等发展过程,但始终没有脱离 PID 控制的范畴。即使目前最新 式的过程控制计算机,其基本控制功能也仍然是 PID 控制。 (3)鲁棒性(robustness)强,其控制品质对被控对象的变化不太敏感,非常适用于环 境恶劣的工业生产现场。所谓鲁棒性,指在存在扰动和未建模动态条件下,也就是系统 的实际动态与应用数学模型之间误差较大时,系统仍能保持稳定性,基本维持原有设计 中控制性能的能力。 它的研究可以从“稳定鲁棒性”和“性能鲁棒性”两方面来区分。 掌握(考点)

内蒙古科技大学教案 (4)PID算法有一套完整的参数整定与设计方法,易于被工程技术人员掌握。 5许多工 业回路中对控制快速性和控制精度要求不是很高,而更重视系统的可靠性 时,使用PID控制能获得较高的性价比。 在过程控制应用中,人们首先想到的总是PD控制,一个大型现代化生产装置的控 制回路可能多达一两百种甚至更多,但其中绝大部分都采用PD控制。当被控制对象易 于控制而控制要求不高时,可采用更简单的开关控制:当被控对象难以控制而控制要求 又特别高,这时如果 PD控制难以达到要求,可以考虑采用更先进的控制方法。 (⑥)长期应用过程中,对PD算法缺陷可以进行改良。例如:为克服微分带米的高频 干扰,采用带滤波的PD控制:为克服大偏差带来的积分饱和及超调现象,可采用积分 分离的PD控制:为补偿被控系统的非线性因素,采用可变增益的PD控制等等。 3.2PID调节规律 在过程控制系统的组成中我们知道,控制器,又称“调节器”,(或“自动调节器” 是过程自动调节中不可缺少的一个环节,它将输出量检测值y)与设定值【进行比较(A ©),然后由调节器按照一定的控制算出输出控制量△u。如果从调节系统中取出一个调节 器,它的作用如图3-1所示。 偏差信号△调节器输出信号△9 图31调节器的输入和输出信号 图中△为偏差信号,习惯上常以偏差在测量仪表全量程中所占的百分数表示: c=测量值-给定值×100% 测量范围 例如:测量范围为0~1100℃,设定温度为980℃,若测量温度为969℃,则偏差信号 为 △e=(969-980)/1100=-1.0% 调节器输出与偏差信号之间的函数关系称为调节规律。调节规律是决定调节器特性 的。在调节器输出稳定之前,偏差△©与输出之间的相互关系,称为调节器的动态特性。 重点(考点) 在调节器上施加恒定的偏差,经过相当长的时间,输出稳定以后,偏差△与输出的相 互关系称为调节器的静态 性 在研究调节器的动态特性时,一般假定:若偏差有一阶跃变化△©,输出u随时间 而变化的增量为△u,△u与△e的函数关系即决定了调节器的调节规律。 常用的调节器规律有许多种,如两位式调节规律、比例调节规律、积分山调节 规律,徽分D调节规、比例积分通节规律、比剑分P心调节规律、比侧积分徽 分D)调节规律 3.2.1双位调节 双位调节器结构简单使用方便、价格便宜,在电阻加热设备的温度调节方面可以 节省电能,故应用很普遍
2 内 蒙 古 科 技 大 学 教 案 (4)PID 算法有一套完整的参数整定与设计方法,易于被工程技术人员掌握。 (5)许多工业回路中对控制快速性和控制精度要求不是很高,而更重视系统的可靠性 时,使用 PID 控制能获得较高的性价比。 在过程控制应用中,人们首先想到的总是 PID 控制,一个大型现代化生产装置的控 制回路可能多达一两百种甚至更多,但其中绝大部分都采用 PID 控制。当被控制对象易 于控制而控制要求不高时,可采用更简单的开关控制;当被控对象难以控制而控制要求 又特别高,这时如果 PID 控制难以达到要求,可以考虑采用更先进的控制方法。 (6)长期应用过程中,对 PID 算法缺陷可以进行改良。例如:为克服微分带来的高频 干扰,采用带滤波的 PID 控制;为克服大偏差带来的积分饱和及超调现象,可采用积分 分离的 PID 控制;为补偿被控系统的非线性因素,采用可变增益的 PID 控制等等。 3.2 PID 调节规律 在过程控制系统的组成中我们知道,控制器,又称“调节器”,(或“自动调节器”) 是过程自动调节中不可缺少的一个环节,它将输出量检测值 y(t)与设定值 r 进行比较(△ e),然后由调节器按照一定的控制算出输出控制量△u。如果从调节系统中取出一个调节 器,它的作用如图 3-1 所示。 图 3-1 调节器的输入和输出信号 图中△e 为偏差信号,习惯上常以偏差在测量仪表全量程中所占的百分数表示: 100% − = 测量范围 测量值 给定值 e 例如:测量范围为 0~1100℃,设定温度为 980℃,若测量温度为 969℃,则偏差信号 为: e = (969 − 980)/1100 = −1.0% 调节器输出与偏差信号之间的函数关系称为调节规律。调节规律是决定调节器特性 的。在调节器输出稳定之前,偏差△e 与输出之间的相互关系,称为调节器的动态特性。 在调节器上施加恒定的偏差,经过相当长的时间,输出稳定以后,偏差△e 与输出的相 互关系称为调节器的静态特性。 在研究调节器的动态特性时,一般假定:若偏差有一阶跃变化△e,输出 u 随时间 而变化的增量为△u,△u 与△e 的函数关系即决定了调节器的调节规律。 常用的调节器规律有许多种,如两位式调节规律、比例(P)调节规律、积分(I)调节 规律、微分(D)调节规律、比例积分(PI)调节规律、比例微分(PD)调节规律、比例积分微 分(PID)调节规律。 3.2.1 双位调节 双位调节器结构简单﹑使用方便、价格便宜,在电阻加热设备的温度调节方面可以 节省电能,故应用很普遍。 重点(考点) 偏差信号 Δe 调节器 输出信号 Δu

内蒙古科技大学教案
3 内 蒙 古 科 技 大 学 教 案
3.22比例调节(P) 3.2.21动作过程 双位调节不可能使被调量稳定在给定数值,这是由于调节机构只按被调量偏差的方向来动作,而 且只有两个极限位置,不可能建立起能量或物流量的平衡,因而被调量也不能稳定。比例调节则慨 是按被调量偏差方向又按其大小成比例地改变调节机构的开度。 即偏差大,开度变化也大:偏差小, 开度变化也小。这样能量变化较为平稳,且最终可以达到能量或物料量的平衡,被调量也就能稳定 下来。 液面调节系统示意图见图32所示。其中,Q1为进料量,Q2为出料量,山为调节器阀门量度。 二←Q1 图3.2液面调节系统 我们可以用一个数学表达式来表示调节器的比例调节规律,由图3-2所示阀门与液柱之间是通 过杠杆来联 的 由相似三角形符出△uW△c=bA所以 AU-BAe-KAe (3-1) 式中: △U=U-U。 一一调节阀开度变化(即调节器的输出信号)方 △e=H-H 测量值与给定值的偏差(即调节器的输入): 一一比例系数。 比例系数K即可以根据需要来调整调节作用的强弱,在图3-2中只要改变支点位置即可。 3.2.2.2比例调节的特 (1)作用快。比例调节一个很大的优点是反应快,无滞后。只要一有偏差,立即就有一个相应 的调节作用。它能及时克服扰动,使被调参数稳定在给定值附近。 (2)有余差(静差)。扰动(如负荷变化)出现后,比例调节的结果使被调量不能回到给定值 而只能恢复到给定值附近,因而有余差。 比例作用的强第用比例晶 (有时又称“比例喷6”、P的变窄即是 点(考 创度6的大小)来表小。比例度6的定义如下: 点 内蒙古科技大学教案
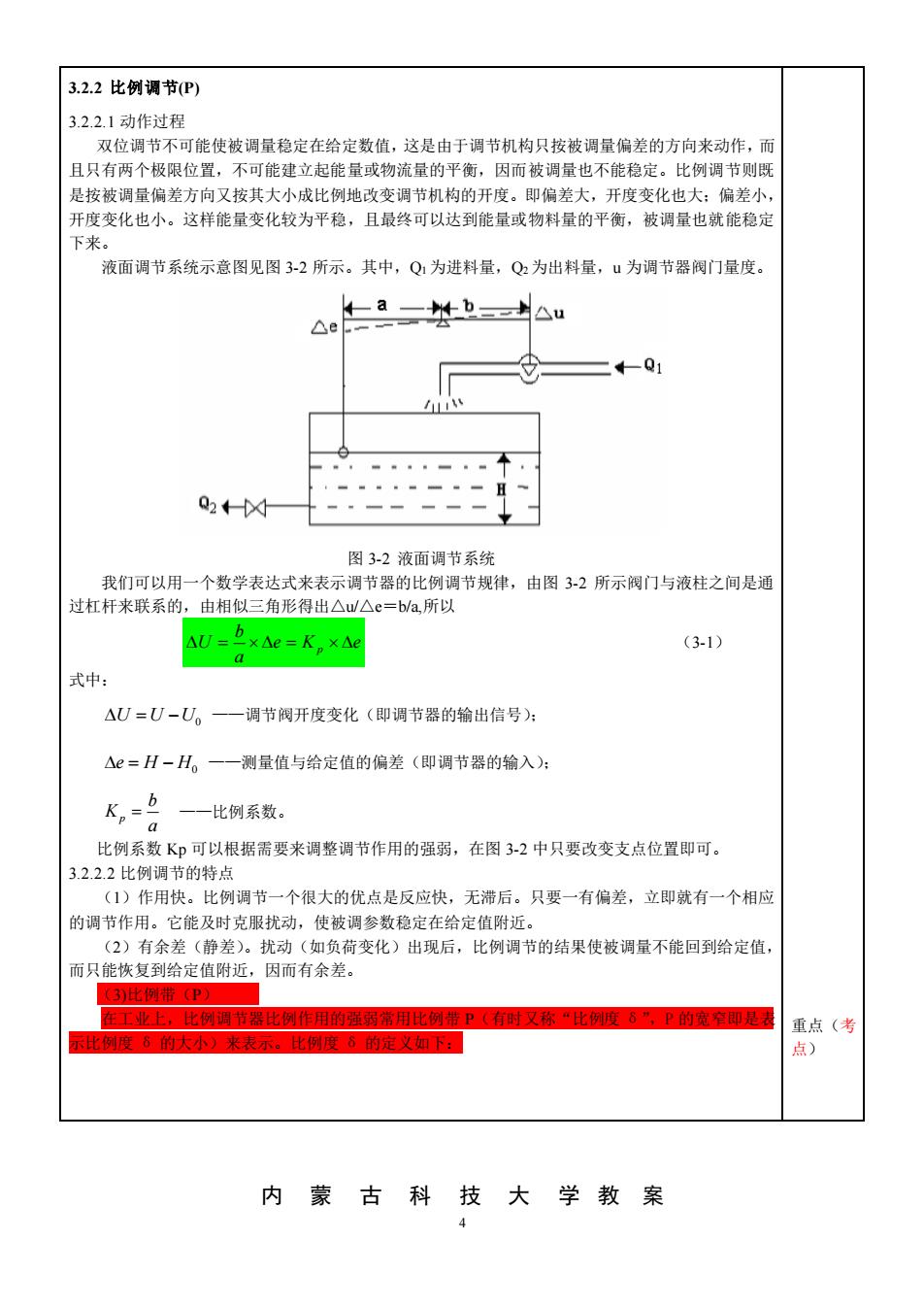
4 3.2.2 比例调节(P) 3.2.2.1 动作过程 双位调节不可能使被调量稳定在给定数值,这是由于调节机构只按被调量偏差的方向来动作,而 且只有两个极限位置,不可能建立起能量或物流量的平衡,因而被调量也不能稳定。比例调节则既 是按被调量偏差方向又按其大小成比例地改变调节机构的开度。即偏差大,开度变化也大;偏差小, 开度变化也小。这样能量变化较为平稳,且最终可以达到能量或物料量的平衡,被调量也就能稳定 下来。 液面调节系统示意图见图 3-2 所示。其中,Q1 为进料量,Q2 为出料量,u 为调节器阀门量度。 图 3-2 液面调节系统 我们可以用一个数学表达式来表示调节器的比例调节规律,由图 3-2 所示阀门与液柱之间是通 过杠杆来联系的,由相似三角形得出△u/△e=b/a,所以 e K e a b U = = p (3-1) 式中: U =U −U0 ——调节阀开度变化(即调节器的输出信号); H H0 e = − ——测量值与给定值的偏差(即调节器的输入); a b Kp = ——比例系数。 比例系数 Kp 可以根据需要来调整调节作用的强弱,在图 3-2 中只要改变支点位置即可。 3.2.2.2 比例调节的特点 (1)作用快。比例调节一个很大的优点是反应快,无滞后。只要一有偏差,立即就有一个相应 的调节作用。它能及时克服扰动,使被调参数稳定在给定值附近。 (2)有余差(静差)。扰动(如负荷变化)出现后,比例调节的结果使被调量不能回到给定值, 而只能恢复到给定值附近,因而有余差。 (3)比例带(P) 在工业上,比例调节器比例作用的强弱常用比例带 P(有时又称“比例度 δ”,P 的宽窄即是表 示比例度 δ 的大小)来表示。比例度 δ 的定义如下: 重点(考 点) 内 蒙 古 科 技 大 学 教 案

×100以 (P-B)AP-P) △eZ=-Z×100% (3-2) AP/(P-P) 式中: △e=H-H。一—调节器的输入偏差: △P=P-R 调节器的相应输出变化: Z一Zn一一调节器输入的变化范围即仪表的量程: P-Pin 一一调节器输出的变化范围 5代表使节升度政变1006,从全关到全时所高的被调量的变1 通。只有当被调量处在这个范围以内,固节网的开度(变化)才与偏差成比例 上例度的名字也就由此而来的。超位个·比例带”以外,调节我已处于全关写 开的状态,此时节器的输出与输人已不再保持比例失系,而节器至少也国 比例带P习用它相对于被测仪表的鼠程的百分 怎示,所以,比例度。又可定义为:使硝节器的输出变化达到全最程《或全范圆 ,输人偏左改变了满量程的百分比。例如,当6一00%时,喻人改变了满量围 的100%,则输出也能校H例地改变其全范丽的100%:当ǒ=200%时,徐入男 %,换句说,即当输☑ 可见,δ大则调节作用就弱,ǒ小则调节作用就强。6的大小也可以用比例 带(P)的宽窄来表示:δ大则比例带(P)宽,6小则比例带(P)窄。 3.2.2.3比例调节的传递函数 比例调节器的传递函数为: (3-4) 其中Kp一一比例系数 比例调节器传递函数的方块图见图3-3所示。 图3-3比例调节器传递函数方块图 内蒙古科技大学教案
5 100% /( ) /( ) 100% ( )/( ) ( )/( ) max min max min 0 max min 0 max min − − = − − − − = P P P e Z Z P P P P H H Z Z (3-2) 式中: H H0 e = − ——调节器的输入偏差; P = P − P0 ——调节器的相应输出变化; Zmax − Zmin ——调节器输入的变化范围即仪表的量程; Pmax − Pmin ——调节器输出的变化范围。 δ 代表使调节阀开度改变 100%,即从全关到全开时所需要的被调量的变化 范围。只有当被调量处在这个范围以内,调节阀的开度(变化)才与偏差成比例, 比例度的名字也就由此而来的。超出这个“比例带”以外,调节阀已处于全关或 全开的状态,此时调节器的输出与输入已不再保持比例关系,而调节器至少也暂 时失去了其控制作用 实际上,调节器的比例带 P 习惯用它相对于被调量测量仪表的量程的百分数 表示,所以,比例度 δ 又可定义为:使调节器的输出变化达到全量程(或全范围) 时,输入偏差改变了满量程的百分比。例如,当 δ=100%时,输入改变了满量程 的 100%,则输出也能按比例地改变其全范围的 100%;当 δ=200%时,输入要 改变满量程的 200%时,输出才能够改变全范围的 100%;换句话说,即当输入 改变满量程的 100%时,输出只能改变其全范围的 50%。 可见,δ 大则调节作用就弱,δ 小则调节作用就强。δ的大小也可以用比例 带(P)的宽窄来表示:δ 大则比例带(P)宽,δ小则比例带(P)窄。 3.2.2.3 比例调节的传递函数 比例调节器的传递函数为: Kp E s U s G s = = ( ) ( ) ( ) (3-4) 其中 Kp ——比例系数 比例调节器传递函数的方块图见图 3-3 所示。 图 3-3 比例调节器传递函数方块图 内 蒙 古 科 技 大 学 教 案