§1-2 运动副、运动链和机构 构件的自由度:构件所具有的独立运动的数 目。 约束:运动副对构件的独立运动所加的限制。 二、运动副的分类: 1.按运动副的接触形式分: 低副:构件与构件之间为面接触,其接触部分 的压强较低。 高副:构件与构件之间为点、线接触,其接触 部分的压强较高
§1-2 运动副、运动链和机构 构件的自由度:构件所具有的独立运动的数 目。 约束:运动副对构件的独立运动所加的限制。 二、运动副的分类: 1.按运动副的接触形式分: 低副:构件与构件之间为面接触,其接触部分 的压强较低。 高副:构件与构件之间为点、线接触,其接触 部分的压强较高
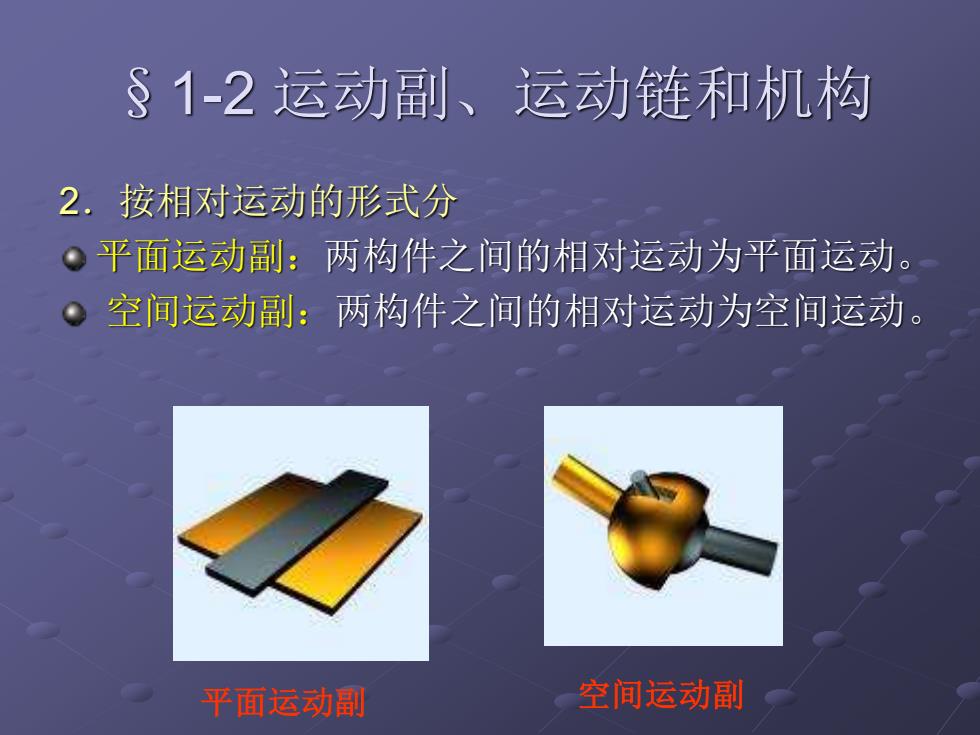
§1-2 运动副、运动链和机构 2.按相对运动的形式分 平面运动副:两构件之间的相对运动为平面运动。 空间运动副:两构件之间的相对运动为空间运动。 平面运动副 空间运动副
§1-2 运动副、运动链和机构 2.按相对运动的形式分 平面运动副:两构件之间的相对运动为平面运动。 空间运动副:两构件之间的相对运动为空间运动。 平面运动副 空间运动副
§1-2 运动副、运动链和机构 3.按运动副引入的约束数分类 引入1个约束的运动副称为1级副,引入2个约束 的运动副称为2级副,引入3个约束的运动副称 为3级副,引入4个约束的运动副称为4级副, 引入5个约束的运动副称为5级副 。 4. 按接触部分的几何形状分 (如图) 表1.1 运动副所属类型、代号及表示符号
§1-2 运动副、运动链和机构 3.按运动副引入的约束数分类 引入1个约束的运动副称为1级副,引入2个约束 的运动副称为2级副,引入3个约束的运动副称 为3级副,引入4个约束的运动副称为4级副, 引入5个约束的运动副称为5级副 。 4. 按接触部分的几何形状分 (如图) 表1.1 运动副所属类型、代号及表示符号
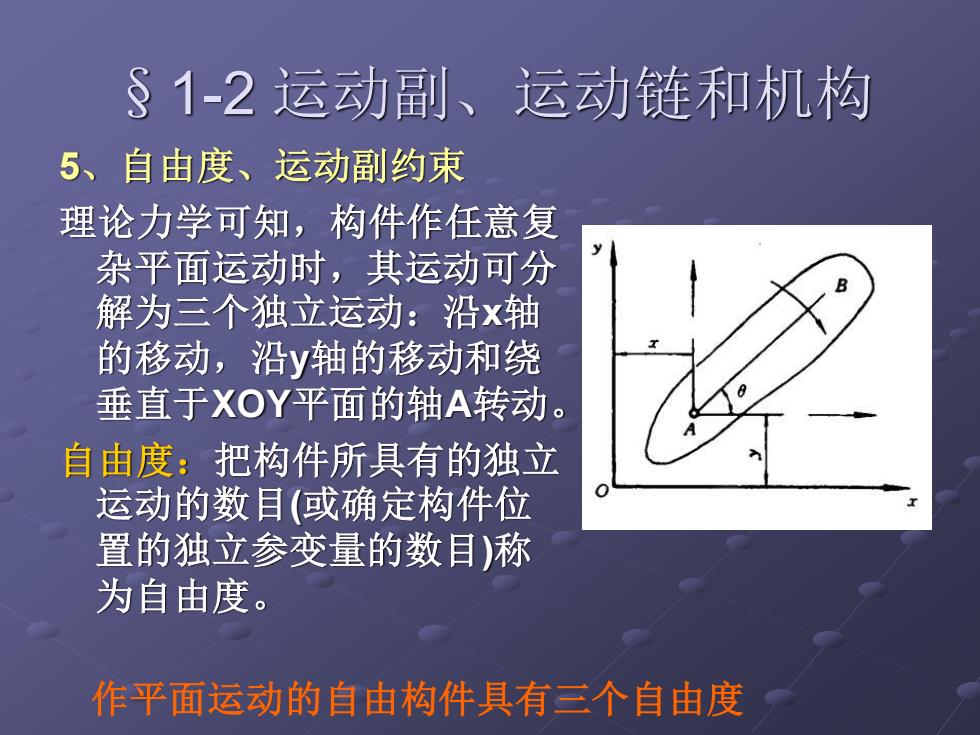
§1-2 运动副、运动链和机构 5、自由度、运动副约束 理论力学可知,构件作任意复 杂平面运动时,其运动可分 解为三个独立运动:沿x轴 的移动,沿y轴的移动和绕 垂直于XOY平面的轴A转动。 自由度:把构件所具有的独立 运动的数目(或确定构件位 置的独立参变量的数目)称 为自由度。 作平面运动的自由构件具有三个自由度
§1-2 运动副、运动链和机构 5、自由度、运动副约束 理论力学可知,构件作任意复 杂平面运动时,其运动可分 解为三个独立运动:沿x轴 的移动,沿y轴的移动和绕 垂直于XOY平面的轴A转动。 自由度:把构件所具有的独立 运动的数目(或确定构件位 置的独立参变量的数目)称 为自由度。 作平面运动的自由构件具有三个自由度
§1-2 运动副、运动链和机构 运动副约束:把对独立运动所加的限制称为 约束。每加上一个约束,构件便失去一个 自由度;加上两个约束,构件便失去两个 自由度。 约束的多少和约束的特点完全取决于运动副 的型式。 移动副:具有两个约束 转动副:具有两个约束 高副:具有一个约束
§1-2 运动副、运动链和机构 运动副约束:把对独立运动所加的限制称为 约束。每加上一个约束,构件便失去一个 自由度;加上两个约束,构件便失去两个 自由度。 约束的多少和约束的特点完全取决于运动副 的型式。 移动副:具有两个约束 转动副:具有两个约束 高副:具有一个约束