实验一机构运动简图的测定 目的 会撒开机械的实际构造而仅仅从运动的观察来绘制其机构的运动简图 2.验证和巩固自由度的计算。 3.分析一些四杆机构的演化过程和验证其曲柄存在条件。 二、设备和工具 (一)设备 1.插齿机 2.小型冲床 3.油泵模型4摆杆导杆机构模型5.其它机械模型 6.缝纫机 7.内燃机8.抛光机9.颚式破啐机 10. 制动机构 11.步进输 送机12.假肢关节机构13.装订机构14.机车驱动机构等模型。 (一)T只 三角尺、纸等(自备) 三、原理和方法 1.原理 由于机构的运动仅与机构中所有的构件数目、运动剧的类型和相对位置有关,因此在 机构运动简图中可以撒开机构的复杂外形和运动副的具体构造而用简单的符号来代替构件 和运动副,并按一定的比例尺表示运动副的相对位置,以此说明实际机构的运动特征, 常用的运动刷代表符号见教科书。须注意有三种运动副构件的表示方法。 2.测绘方法 ā.测绘时使被测绘的机器或模型缓慢地运动,从原动构件开始仔细观察机构的运动, 分成几个运动单位,从而确定组成的构件数目。 b.根据相联接的两构件间的接触情况及相对运动的性质确定各个运动刷的类型和数目。 c.在草稿纸上按规定的符号及构件的联接次序,在确定原动件的合适位置后,从原构件 开始。逐步画出机构运动简图的草稿 数字 分别表示各 构件,用A、B、C、 分别标注各运动副。在原动件上画箭头表示原动件及原动件的转向或移动方向。 仔细测量与机构运动有关的尺寸,既转动副间的中心距和移动副导路的位置尺寸或角度 等,在所确定的原动件的位置按一定的比例尺将草稿画成正式的运动简图,注意这里的比例 与机械先制图中中的不同。 实际长度(L)四 比例尺= 图上长度(Ls)m 四、实验步骤 1.阅读教科书有关章节,从所举实例中,熟悉绘制机构运动简图的方法。 2.在草稿上绘制指定的几个机构运动简图。要求如下: 3.冲床模型须要求按比例绘出冲压机构的机构运动简图。指出它属于哪一种四杆机构 并指出各个运动副,计算自由度。 4.油泵模型须测量各构件的实际尺寸,按比例绘出其机构运动简图。指出它们是哪一种 四杆机构,如何演化而成?并计算其自由度。其各构件的长度是否符合四杆曲柄存在条件? 5.绘出插齿机插刀上下往复运动机构的运动简图。计算其自由度。为节省时间可不进行 测量。但应目测使实物大致一样。 6.绘出摆动导杆机构的运动简图,计算其自由度,也不进行测量,凭目测使图与实物 大致相等。 7.绘出转动杆机构或其它机构的运动简图,计算自由度。实验完成后将草稿交给教师
实验一 机构运动简图的测定 一、目的 1.学会撇开机械的实际构造而仅仅从运动的观察来绘制其机构的运动简图。 2.验证和巩固自由度的计算。 3.分析一些四杆机构的演化过程和验证其曲柄存在条件。 二、设备和工具 (一)设备 1.插齿机 2.小型冲床 3.油泵模型 4.摆杆导杆机构模型 5.其它机械模型 6.缝纫机 7.内燃机 8.抛光机 9.颚式破啐机 10. 制动机构 11.步进输 送机 12.假肢关节机构 13.装订机构 14.机车驱动机构等模型。 (二)工具 三角尺、纸等(自备) 三、原理和方法 1.原理: 由于机构的运动仅与机构中所有的构件数目、运动副的类型和相对位置有关,因此在 机构运动简图中可以撇开机构的复杂外形和运动副的具体构造而用简单的符号来代替构件 和运动副,并按一定的比例尺表示运动副的相对位置,以此说明实际机构的运动特征, 常用的运动副代表符号见教科书。须注意有三种运动副构件的表示方法。 2.测绘方法: a.测绘时使被测绘的机器或模型缓慢地运动,从原动构件开始仔细观察机构的运动, 分成几个运动单位,从而确定组成的构件数目。 b.根据相联接的两构件间的接触情况及相对运动的性质确定各个运动副的类型和数目。 c.在草稿纸上按规定的符号及构件的联接次序,在确定原动件的合适位置后,从原构件 开始。逐步画出机构运动简图的草稿,用数字 1、2、3……分别表示各构件,用 A、B、C、…… 分别标注各运动副。在原动件上画箭头表示原动件及原动件的转向或移动方向。 仔细测量与机构运动有关的尺寸,既转动副间的中心距和移动副导路的位置尺寸或角度 等,在所确定的原动件的位置按一定的比例尺将草稿画成正式的运动简图,注意这里的比例 与机械制图中中的不同。 实际长度(LAB)m 比例尺= —————————— 图上长度(LAB)mm 四、实验步骤 1.阅读教科书有关章节,从所举实例中,熟悉绘制机构运动简图的方法。 2.在草稿上绘制指定的几个机构运动简图。要求如下: 3.冲床模型须要求按比例绘出冲压机构的机构运动简图。指出它属于哪一种四杆机构, 并指出各个运动副,计算自由度。 4.油泵模型须测量各构件的实际尺寸,按比例绘出其机构运动简图。指出它们是哪一种 四杆机构,如何演化而成?并计算其自由度。其各构件的长度是否符合四杆曲柄存在条件? 5.绘出插齿机插刀上下往复运动机构的运动简图。计算其自由度。为节省时间可不进行 测量。但应目测使实物大致一样。 6.绘出摆动导杆机构的运动简图,计算其自由度,也不进行测量,凭目测使图与实物 大致相等。 7.绘出转动杆机构或其它机构的运动简图,计算自由度。实验完成后将草稿交给教师
审阅。 8绘出缝纫机的脚踏板部分和机针部分的机构示意图。 五、思考题 一个正确的“机构运动简图”应能说明那些内容? 2.绘制机构运动简图时,原动构件的位置为什么可以任意选定?会不会影响简图的正确 性? 3.机构自由度的计算对测绘运动简图有何帮助? 六、实验报告要求 在实验报告中,要写上所测绘机构运动简图的名称,并计算其自由度
审阅。 8.绘出缝纫机的脚踏板部分和机针部分的机构示意图。 五、 思考题 1.一个正确的“机构运动简图”应能说明那些内容? 2.绘制机构运动简图时,原动构件的位置为什么可以任意选定?会不会影响简图的正确 性? 3.机构自由度的计算对测绘运动简图有何帮助? 六、 实验报告要求 在实验报告中,要写上所测绘机构运动简图的名称,并计算其自由度
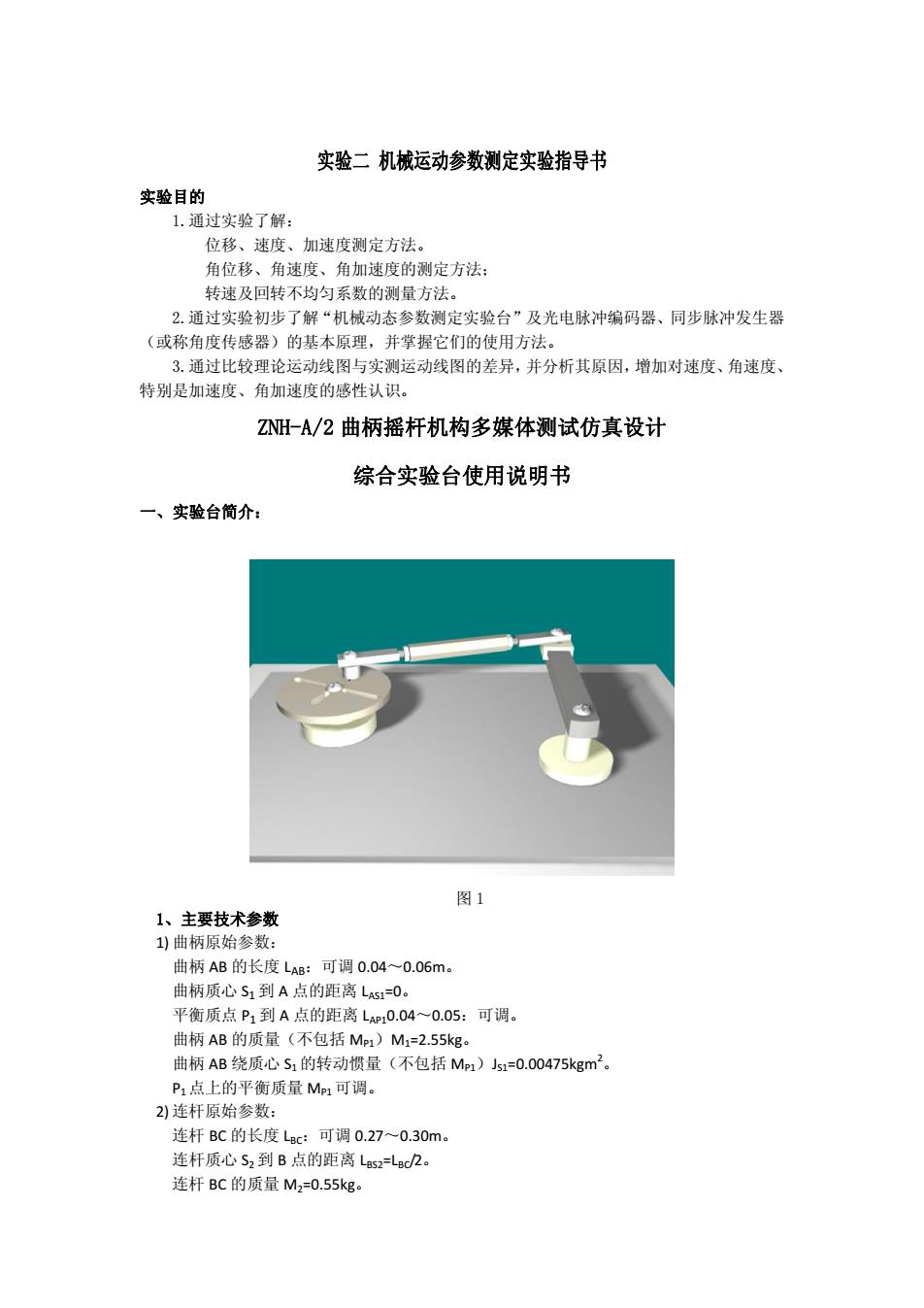
实验二机械运动参数测定实验指导书 实验目的 1.通过实验了解: 位移、速度、加速度测定方法。 角位移、角速度、角加速度的测定方法: 转速及回转不均匀系数的测量方法 2.通过实验初步了解“机械动态参数测定实验台”及光电脉冲编码器、同步脉冲发生器 (或称角度传感器)的基本原理,并掌握它们的使用方法。 3.通过比较理论运动线图与实测运动线图的差异,并分析其原因,增加对速度、角速度、 特别是加速度、角加速度的感性认识。 ZNH-A/2曲柄摇杆机构多媒体测试仿真设计 综合实验台使用说明书 一、实验台简介: 图1 1、主要技术参数 1)曲柄原始参数: 曲柄AB的长度LaB:可调0.04~0.06m。 曲柄质心S,到A点的距离Ls=0。 平衡质点P1到A点的距离Lap10.040.05:可调。 曲柄AB的质量(不包括M)M=2558。 曲柄AB绕质心S1的转动惯量(不包括Mp1)s1=0.00475kgm2。 P,点上的平衡质量M1可调. 2)连杆原始参数: 连杆BC的长度L。e:调0.270.30m 连杆质心S2到B点的距离L52L2。 连杆BC的质量M,=0.55kg
实验二 机械运动参数测定实验指导书 实验目的 1.通过实验了解: 位移、速度、加速度测定方法。 角位移、角速度、角加速度的测定方法; 转速及回转不均匀系数的测量方法。 2.通过实验初步了解“机械动态参数测定实验台”及光电脉冲编码器、同步脉冲发生器 (或称角度传感器)的基本原理,并掌握它们的使用方法。 3.通过比较理论运动线图与实测运动线图的差异,并分析其原因,增加对速度、角速度、 特别是加速度、角加速度的感性认识。 ZNH-A/2 曲柄摇杆机构多媒体测试仿真设计 综合实验台使用说明书 一、实验台简介: 图 1 1、主要技术参数 1) 曲柄原始参数: 曲柄 AB 的长度 LAB:可调 0.04~0.06m。 曲柄质心 S1 到 A 点的距离 LAS1=0。 平衡质点 P1 到 A 点的距离 LAP10.04~0.05:可调。 曲柄 AB 的质量(不包括 MP1)M1=2.55kg。 曲柄 AB 绕质心 S1的转动惯量(不包括 MP1)JS1=0.00475kgm2 。 P1点上的平衡质量 MP1可调。 2) 连杆原始参数: 连杆 BC 的长度 LBC:可调 0.27~0.30m。 连杆质心 S2到 B 点的距离 LBS2=LBC/2。 连杆 BC 的质量 M2=0.55kg
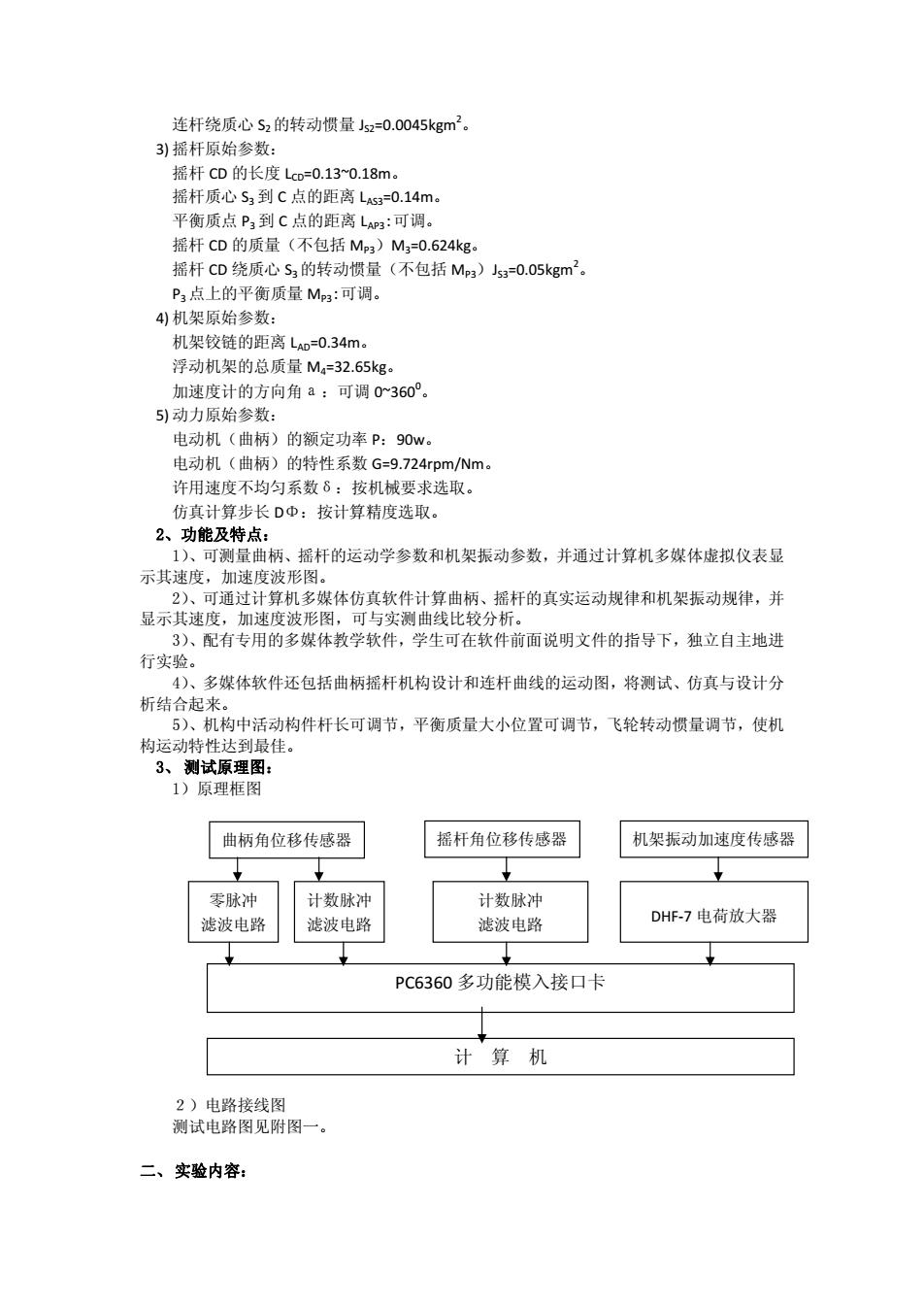
连杆绕质心52的转动惯量2=0.0045kgm2. 3)摇杆原始参数: CD的长度 -0.130.18m 摇杆质心S,到c点的距离Ls3=0.14m 平衡质点P,到C点的距离Lz:可调。 摇杆CD的质量(不包括Mp:)M3-0.624kg。 摇杆CD绕质心S,的转动惯量(不包括M,)s,=0.05kgm2 P点上的平衡质量M:可调。 4)机架原始参数 机架铰链的距离Lsn=0.34m。 浮动机架的总质量M=32.65kg。 加速度计的方向角a:可调0~360°。 5引动力原始参数: 电动和 (曲柄)的额定功率P:9Ow 电动机(曲柄)的特性系数G=9.724rpm/Nm 许用速度不均匀系数δ:按机械要求选取。 仿真计算步长DΦ:按计算精度选取。 2、功能及特点: 1)、可测量曲柄、摇杆的运动学参数和机架振动参数,并通过计算机多媒体虚拟仪表显 示其速度,加速度波形图。 曼不示式器体物高紫新清电视新的真实运功伴肌深玉动度弗,并 测曲线比分析 实验:配有专用的多媒体教学软件,学生可在软件前面说明文件的指导下,独立自主地 、多媒体软件还包括曲柄摇杆机构设计和连杆曲线的运动图,将测试、仿真与设计分 5)、机构中活动构件杆长可调节,平衡质量大小位置可调节,飞轮转动惯量调节,使机 构运动特性达到最佳。 3、测试原理图: 1)原理框图 曲柄角位移传感器 摇杆角位移传感器 机架振动加速度传感器 零脉冲 计数脉冲 计数脉冲 滤波申路 滤波电路 滤波电路 DHF-7电荷放大器 PC6360多功能模入接口卡 计 算机 2)电路接线 测试电路图见附图一。 二、实验内容
连杆绕质心 S2的转动惯量 JS2=0.0045kgm2 。 3) 摇杆原始参数: 摇杆 CD 的长度 LCD=0.13~0.18m。 摇杆质心 S3到 C 点的距离 LAS3=0.14m。 平衡质点 P3到 C 点的距离 LAP3:可调。 摇杆 CD 的质量(不包括 MP3)M3=0.624kg。 摇杆 CD 绕质心 S3的转动惯量(不包括 MP3)JS3=0.05kgm2 。 P3点上的平衡质量 MP3:可调。 4) 机架原始参数: 机架铰链的距离 LAD=0.34m。 浮动机架的总质量 M4=32.65kg。 加速度计的方向角а:可调 0~3600 。 5) 动力原始参数: 电动机(曲柄)的额定功率 P:90w。 电动机(曲柄)的特性系数 G=9.724rpm/Nm。 许用速度不均匀系数δ:按机械要求选取。 仿真计算步长 DΦ:按计算精度选取。 2、功能及特点: 1)、可测量曲柄、摇杆的运动学参数和机架振动参数,并通过计算机多媒体虚拟仪表显 示其速度,加速度波形图。 2)、可通过计算机多媒体仿真软件计算曲柄、摇杆的真实运动规律和机架振动规律,并 显示其速度,加速度波形图,可与实测曲线比较分析。 3)、配有专用的多媒体教学软件,学生可在软件前面说明文件的指导下,独立自主地进 行实验。 4)、多媒体软件还包括曲柄摇杆机构设计和连杆曲线的运动图,将测试、仿真与设计分 析结合起来。 5)、机构中活动构件杆长可调节,平衡质量大小位置可调节,飞轮转动惯量调节,使机 构运动特性达到最佳。 3、 测试原理图: 1)原理框图 曲柄角位移传感器 摇杆角位移传感器 零脉冲 滤波电路 计数脉冲 滤波电路 计数脉冲 滤波电路 计 算 机 PC6360 多功能模入接口卡 DHF‐7 电荷放大器 机架振动加速度传感器 2)电路接线图 测试电路图见附图一。 二、 实验内容:
摇杆运动仿真和实测:通过数模计算得出摇杆的真实运动规律,作出摇杆相对曲柄转角 的角速度线图,角加速度线图。通过摇杆上的角位移传感器,曲柄上的角位移传感器和A/D 转换板进行数据采集,转换和处理,输入计算机,显示出实测的摇杆相对曲柄转角的角速度 线图和角加速度线图。通过分析比较,使学生了解机构结构对摇杆的速度波动和急回特性的 影响。 三、软件界面操作说明: 1)曲柄摇杆机构动画演示界面 该界面 显示实际曲柄摇杆机构的三维动画和该实验模块的实验内容,实验步骤及界面操 作说明(见图2)。各控键说明如下: 上w 图2 [上一祯]:单击此键,窗体显示该曲柄摇杆机构的三维画面的上一祯 [下一祯]:单击此键,窗体显示该曲柄摇杆机构的三维画面的下一祯。 [继续]:单击此键,窗体显示该曲柄摇杆机构的三维动画,同时[继续]变为[暂停]:反之, 单击[暂停],三维动画停止,[继续]变为[暂停]。 [曲柄摇杆机构]:单击此键,进入曲柄摇杆机构原始参数输入界面。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐]:反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [内容简介]:单击此健,窗口显示曲柄摇杆机构综合实验模块的实验内容、实验步骤及软 件界面操作说明,同时[内容简介】变为[动画演示]:反之,单击[动画演示],窗体显示曲 柄摇杆机构的三维动画,[动细演示]变为[内容简介]。 [返回]:单击此键,返回曲柄摇杆机构动画演示界面。 [退出]:单击此键,结束程序的运行,返回WINDOWS界面。 2)曲柄摇杆机构原始参数输入界面 在该界面上输入的参数包括:曲柄、连杆、摇杆的长度、质量和转动惯量,许用速度不 均匀系数,电动机特性参数(见图3)。各控键说明如下:
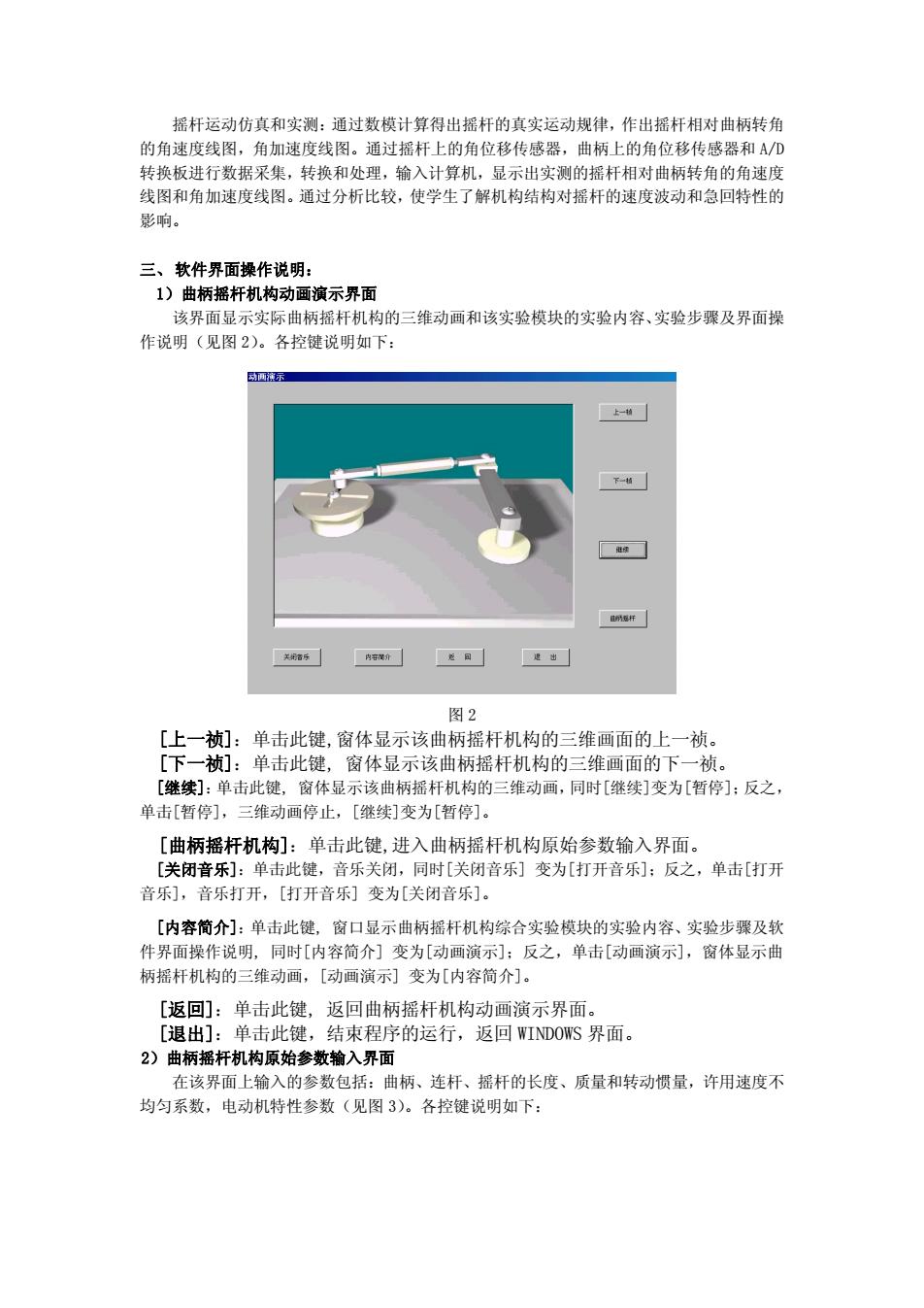
摇杆运动仿真和实测:通过数模计算得出摇杆的真实运动规律,作出摇杆相对曲柄转角 的角速度线图,角加速度线图。通过摇杆上的角位移传感器,曲柄上的角位移传感器和 A/D 转换板进行数据采集,转换和处理,输入计算机,显示出实测的摇杆相对曲柄转角的角速度 线图和角加速度线图。通过分析比较,使学生了解机构结构对摇杆的速度波动和急回特性的 影响。 三、 软件界面操作说明: 1)曲柄摇杆机构动画演示界面 该界面显示实际曲柄摇杆机构的三维动画和该实验模块的实验内容、实验步骤及界面操 作说明(见图 2)。各控键说明如下: 图 2 [上一祯]:单击此键,窗体显示该曲柄摇杆机构的三维画面的上一祯。 [下一祯]:单击此键, 窗体显示该曲柄摇杆机构的三维画面的下一祯。 [继续]:单击此键, 窗体显示该曲柄摇杆机构的三维动画,同时[继续]变为[暂停];反之, 单击[暂停],三维动画停止,[继续]变为[暂停]。 [曲柄摇杆机构]:单击此键,进入曲柄摇杆机构原始参数输入界面。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐] 变为[打开音乐];反之,单击[打开 音乐],音乐打开,[打开音乐] 变为[关闭音乐]。 [内容简介]:单击此键, 窗口显示曲柄摇杆机构综合实验模块的实验内容、实验步骤及软 件界面操作说明, 同时[内容简介] 变为[动画演示];反之,单击[动画演示],窗体显示曲 柄摇杆机构的三维动画,[动画演示] 变为[内容简介]。 [返回]:单击此键, 返回曲柄摇杆机构动画演示界面。 [退出]:单击此键,结束程序的运行,返回 WINDOWS 界面。 2)曲柄摇杆机构原始参数输入界面 在该界面上输入的参数包括:曲柄、连杆、摇杆的长度、质量和转动惯量,许用速度不 均匀系数,电动机特性参数(见图 3)。各控键说明如下: