物流工程综合实验 实验一物流技术装备认知实验 一、实验任务 1、认识实验室中的物流技术装备及其在物流系统中的作用和特点 2、按功能进行物流装备的分类 二、实验目的 1、了解物流装备的定义和分类 2、熟悉仓储设备的布局及其用途 3、学握物流系统中搬运设备的种类及选择依据 4、锻炼学生制定物流技术装备选择标准的能力 三、实验原理 1、物流实验系统的功能要求及意义 物流工程是工业工程专业的一门重要专业课程。本实验的主要目的是建立一个柔性化 的、可组合式的、手动和全自动化并存的现代生产企业小型物流模拟系统,为学生提供 个实现设计思想的实物实验和验证环境 2、物流装备的定义及分类 物流装备是指用于储存、装卸搬运、运输、包装、流通加工、配送、信息采集与处理 等物流活动的设备或装备的总称。物流装备按功能可分为储存设备、装卸搬运设备、运输 设备、包装设备、流通加工设备、信息采集与处理设备、集装单元化装备等七大类。本实 验主要涉及到立体化仓储的储存设备(货架入、装卸搬运设备(各类输送机、巷道堆垛机、 叉车、AGV等设备),需要根据课堂教学内容,重点掌握这些设备的性能指标、主要参数 和使用范围。 3、物流实验系统的组合平台结构框图 如图1所示,该结构图包括生产企业原材料入库、原材料出库、半成品加工、生产 流水线装配到成品入成品库各个功能环节的物料搬运过程,真实体现了制造企业物流与 生产计划控制的集成过程
1 物流工程综合实验 实验一 物流技术装备认知实验 一、实验任务 1、认识实验室中的物流技术装备及其在物流系统中的作用和特点 2、按功能进行物流装备的分类 二、实验目的 1、了解物流装备的定义和分类 2、熟悉仓储设备的布局及其用途 3、掌握物流系统中搬运设备的种类及选择依据 4、锻炼学生制定物流技术装备选择标准的能力 三、实验原理 1、物流实验系统的功能要求及意义 物流工程是工业工程专业的一门重要专业课程。本实验的主要目的是建立一个柔性化 的、可组合式的、手动和全自动化并存的现代生产企业小型物流模拟系统,为学生提供一 个实现设计思想的实物实验和验证环境。 2、物流装备的定义及分类 物流装备是指用于储存、装卸搬运、运输、包装、流通加工、配送、信息采集与处理 等物流活动的设备或装备的总称。物流装备按功能可分为储存设备、装卸搬运设备、运输 设备、包装设备、流通加工设备、信息采集与处理设备、集装单元化装备等七大类。本实 验主要涉及到立体化仓储的储存设备(货架)、装卸搬运设备(各类输送机、巷道堆垛机、 叉车、AGV 等设备),需要根据课堂教学内容,重点掌握这些设备的性能指标、主要参数 和使用范围。 3、物流实验系统的组合平台结构框图 如图 1 所示,该结构图包括生产企业原材料入库、原材料出库、半成品加工、生产 流水线装配到成品入成品库各个功能环节的物料搬运过程,真实体现了制造企业物流与 生产计划控制的集成过程

人搬运>立体仓库 人工操作模块 人工操作机床 (手动控制) 人工小车搬运系统 人工上下货物 现代化横块 生产流水线 数控机床 (可变速自动)A GV小车机器人输送机系统 自动立体库 生产线出入货 货源需求 出入生产线信总 图!物流试验系统组合平台结构框架困 四、实验设备、仪器 1、自动化立体仓库(AS/RS) 设备名称 具体配置 货架 单排,12列×5层,小型货 巷道堆垛机 考虑实验室房间现场实际情况,选择占地紧凑、结构合理的国产垂直 悬挂式堆垛机 控制系统 由可编程序控制器、通信系统、变频器、堆垛机控制柜、继电器及等 电气设备组成,包括手动控制、自动控制两种方式 辅助设施 辊子输送机 动力辊子输送机(直线型)×2 移动机器人及其控制 采用日本进口6自由度、负重3g机器人、并增加气控爪手 系统 自动导航小车(AGV)AGV小车采用无轨道自动导航 及其控制系统 2、智能化仓库 设备名称 具体配置 货架 单排,6列×3层,小型货
2 图 1 物流试验系统组合平台结构框架图 四、实验设备、仪器 1、自动化立体仓库(AS/RS) 设备名称 具体配置 货 架 单排,12 列 × 5 层,小型货架 巷道堆垛机 考虑实验室房间现场实际情况,选择占地紧凑、结构合理的国产垂直 悬挂式堆垛机 控制系统 由可编程序控制器、通信系统、变频器、堆垛机控制柜、继电器及等 电气设备组成,包括手动控制、自动控制两种方式 辅助设施 − 辊子输送机 − 移动机器人及其控制 系统 − 自动导航小车(AGV) 及其控制系统 动力辊子输送机(直线型)× 2 采用日本进口 6 自由度、负重 3kg 机器人、并增加气控爪手 AGV 小车采用无轨道自动导航 2、智能化仓库 设备名称 具体配置 货 架 单排,6 列 × 3 层,小型货架
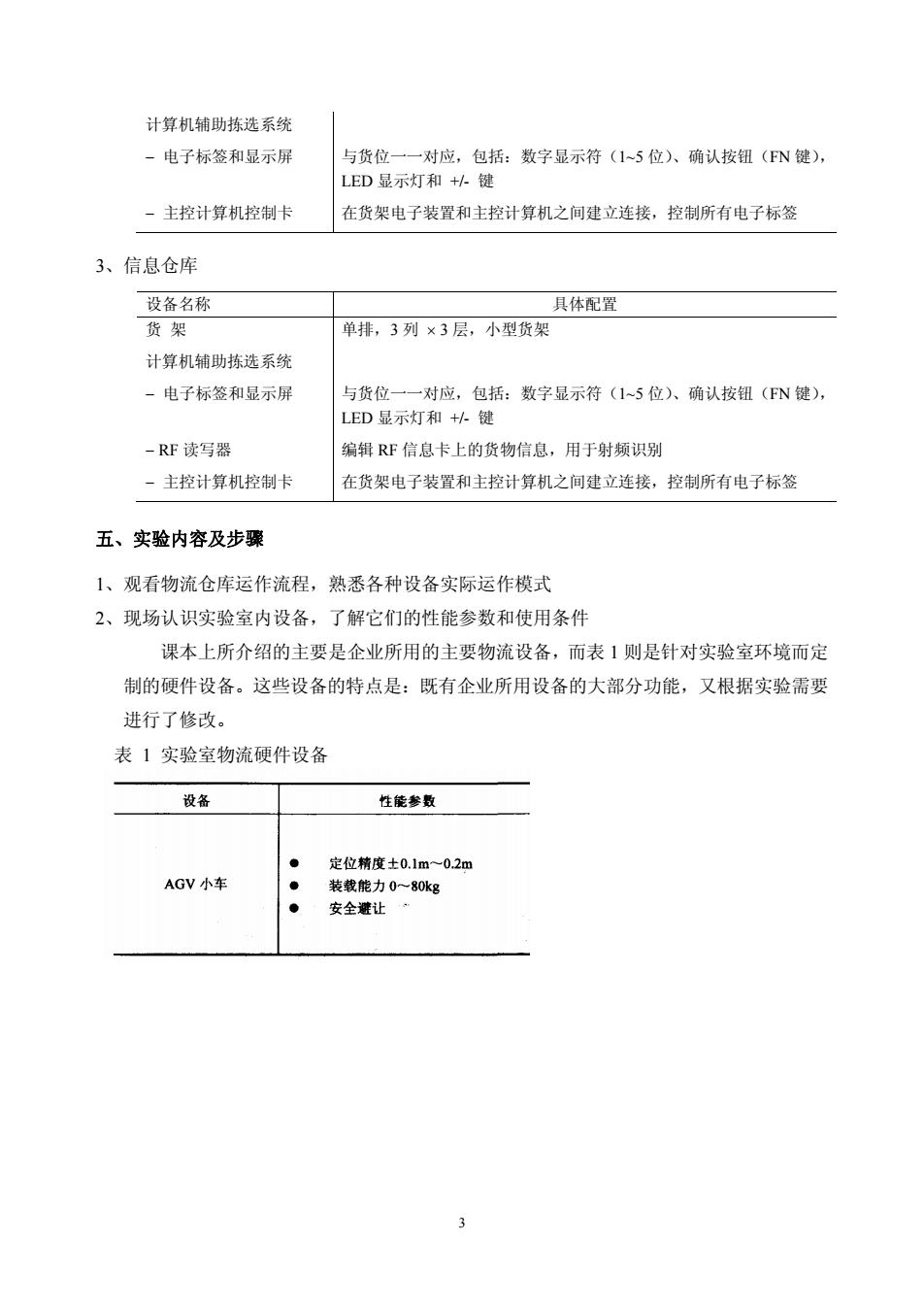
计算机辅助拣选系统 电子标签和显示屏 与货位一一对应,包括:数字显示符(1~5位)、确认按纽(FN键), LED显示灯和+h.键 一主控计算机控制卡 在货架电子装置和主控计算机之间建立连接,控制所有电子标签 3、信息仓库 设备名称 具体配置 货架 单排,3列×3层,小型货架 计算机辅助拣选系统 一电子标签和显示屏 与货位一一对应,包括:数字显示符(1~5位)、确认按纽(FN键), LED显示灯和+从键 -RF读写器 编辑RF信息卡上的货物信息,用于射频识别 一主控计算机控制卡 在货架电子装置和主控计算机之间建立连接,控制所有电子标签 五、实验内容及步骤 1、观看物流仓库运作流程,熟悉各种设备实际运作模式 2、现场认识实验室内设备,了解它们的性能参数和使用条件 课本上所介绍的主要是企业所用的主要物流设备,而表1则是针对实验室环境而定 制的硬件设备。这些设备的特点是:既有企业所用设备的大部分功能,又根据实验需要 进行了修改。 表1实验室物流硬件设备 设备 性能参数 定位精度±0.1m~0.2m AGV小车 : 装我能力0~80kg 安全避让
3 计算机辅助拣选系统 − 电子标签和显示屏 − 主控计算机控制卡 与货位一一对应,包括:数字显示符(1~5 位)、确认按钮(FN 键), LED 显示灯和 +/- 键 在货架电子装置和主控计算机之间建立连接,控制所有电子标签 3、信息仓库 设备名称 具体配置 货 架 单排,3 列 × 3 层,小型货架 计算机辅助拣选系统 − 电子标签和显示屏 − RF 读写器 − 主控计算机控制卡 与货位一一对应,包括:数字显示符(1~5 位)、确认按钮(FN 键), LED 显示灯和 +/- 键 编辑 RF 信息卡上的货物信息,用于射频识别 在货架电子装置和主控计算机之间建立连接,控制所有电子标签 五、实验内容及步骤 1、观看物流仓库运作流程,熟悉各种设备实际运作模式 2、现场认识实验室内设备,了解它们的性能参数和使用条件 课本上所介绍的主要是企业所用的主要物流设备,而表 1 则是针对实验室环境而定 制的硬件设备。这些设备的特点是:既有企业所用设备的大部分功能,又根据实验需要 进行了修改。 表 1 实验室物流硬件设备
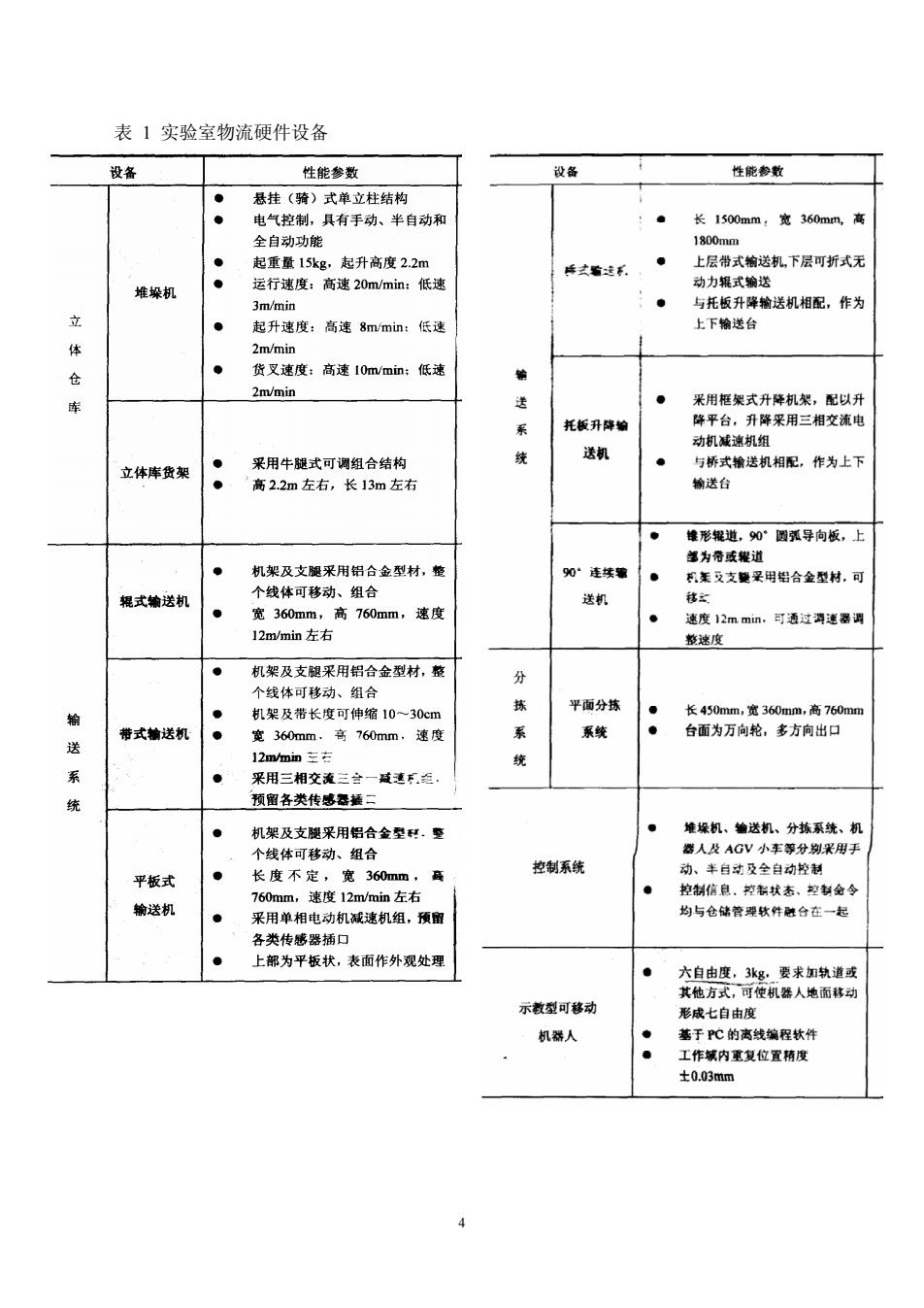
表1实验室物流硬件设备 性能参数 设备 性能参数 悬挂(骑)式单立柱结构 电气控制 具有手动、半自动和 13500mm,宽360mm,高 全自动功能 起重重1 起升高度2.2m 上层带 式输送机下层可折式 堆机 运行速 高速20m/min:低 与托板升降输送机相配,作为 起升速度 高速8mmin:低速 上下输送台 体 在 货叉速度:高速10mmim:低速 输 采用框架式升降机架,配以升 托板升降 降平台,升降采用三相交流电 缘 普顿 动机速机细 立体库货架 果用牛腿式可调组合结构 式输送机相配。作为上 高2.2m左右,长13m左才 ● 罐形规道。90°国风导向饭,上 笔为滑适想道 90连续 和美及支曼妥用铝合金型材,可 粮式输送机 送机 林固 mm,高760mm,速度 min左右 速度12mmn,可透过速备调 机架及支腿采用帽合金型材,整 体可移 组合 机架及带 度可伸缩1030 平面分 长450nm,宽360mm,商760m 带式输送机 高760mm,速度 系 系统 台面为万向轮,多方向出口 系 采用三相交流三合一减速至。 预留各类传少器挺二 机架及支腿采用铝合金型利,季 个线体可移动、组合 控制系统 平板式 长度不定, 毫360mm 输送机 760mm,速度12mmin左右 妇制信自物状末。整制合态 采用单相电动机减速机组,预留 均与仓总管理软件避合在一起 上部为平板状,表面作外观处现 示教型可移动 形成七自由度 机器人 善于P℃的离线编程软件 工作域内重复位置精度 ±0.03mm
4 表 1 实验室物流硬件设备
实验二仓库货位管理实验 一、实验任务 1、熟悉并能运用现有实验软件按要求完成全自动立体仓库的存储、搬运等任务 2、了解机器人的工作原理,并能正确开启机器人设备,进行货物的搬运 二、实验原理 仓储管理的重要工作之一是货位管理,其目的是保证存货质量,提高仓库容积利用 率,降低仓库运营费用。使学生在体验中理解货位管理的基本理论和方法。 三、实验设备 1、自动化立体仓库(ASRS) 设备名称 具体配置 货架 单排,12列×5层,小型货 巷道堆垛机 考虑实验室房间现场实际情况,选择占地紧凑、结构合理的国产垂直 悬挂式堆垛机 控制系统 由可编程序控制器、通信系统、变频器、堆垛机控制柜、继电器及等 电气设备组成,包括手动控制、自动控制两种方式 辅助设施 一辊子输送机 动力辊子输送机(直线型)×2 移动机器人及其控制 采用日本进口6自由度、负重3kg机器人、并增加气控爪手 系统 自动导航小车(AGV)AGV小车采用无轨道自动导航 及其控制系统 2、智能化仓库 设备名称 具体配置 货架 单排,6列×3层,小型货 计算机辅助拣选系统 一电子标签和显示屏 与货位一一对应,包括:数字显示符(~5位)、确认按纽(FN键), LED显示灯和+键 一主控计算机控制卡 在货架电子装置和主控计算机之间建立连接,控制所有电子标签 3、信息仓库
5 实验二 仓库货位管理实验 一、实验任务 1、熟悉并能运用现有实验软件按要求完成全自动立体仓库的存储、搬运等任务 2、了解机器人的工作原理,并能正确开启机器人设备,进行货物的搬运 二、实验原理 仓储管理的重要工作之一是货位管理,其目的是保证存货质量,提高仓库容积利用 率,降低仓库运营费用。使学生在体验中理解货位管理的基本理论和方法。 三、实验设备 1、自动化立体仓库(AS/RS) 设备名称 具体配置 货 架 单排,12 列 × 5 层,小型货架 巷道堆垛机 考虑实验室房间现场实际情况,选择占地紧凑、结构合理的国产垂直 悬挂式堆垛机 控制系统 由可编程序控制器、通信系统、变频器、堆垛机控制柜、继电器及等 电气设备组成,包括手动控制、自动控制两种方式 辅助设施 − 辊子输送机 − 移动机器人及其控制 系统 − 自动导航小车(AGV) 及其控制系统 动力辊子输送机(直线型)× 2 采用日本进口 6 自由度、负重 3kg 机器人、并增加气控爪手 AGV 小车采用无轨道自动导航 2、智能化仓库 设备名称 具体配置 货 架 单排,6 列 × 3 层,小型货架 计算机辅助拣选系统 − 电子标签和显示屏 − 主控计算机控制卡 与货位一一对应,包括:数字显示符(1~5 位)、确认按钮(FN 键), LED 显示灯和 +/- 键 在货架电子装置和主控计算机之间建立连接,控制所有电子标签 3、信息仓库