雷达标绘的意义 ·满足/符合《国际海上避碰规则》的要求 ●雷达操纵示意图及其应用 。转向不变线的应用
二、雷达标绘的意义 ⚫ 满足/符合《国际海上避碰规则》的要求 ⚫ 雷达操纵示意图及其应用 ⚫ 转向不变线的应用

§2、使用雷达协助避碰应注意的事项 一、 注意事项: 1、雷达的自身特性 效果和局限性 因此不能盲目、片面的依赖雷达 2、雷达观测不能完成代替人眼的视觉观察 《避 碰规则》了望条款的要求 。3、雷达开机的延时一 要求雷达及时开机 04、 雷达阴影扇形、影像失真、以及干扰等的影响 。5、应连续观测和标绘,并检验避让行动的效果 6、应清楚雷达的显示方式以及雷达运动方式 ●二、案例: 。1、显示方式认识的错误 ·2、雷达局限性
§2、使用雷达协助避碰应注意的事项 ⚫ 一、注意事项: ⚫ 1、雷达的自身特性 —— 效果和局限性 ⚫ 因此不能盲目、片面的依赖雷达 ⚫ 2、雷达观测不能完成代替人眼的视觉观察 ——《避 碰规则》了望条款的要求 ⚫ 3、雷达开机的延时 —— 要求雷达及时开机 ⚫ 4、雷达阴影扇形、影像失真、以及干扰等的影响 ⚫ 5、应连续观测和标绘,并检验避让行动的效果 ⚫ 6、应清楚雷达的显示方式以及雷达运动方式 ⚫ 二、案例: ⚫ 1、显示方式认识的错误 ⚫ 2、雷达局限性
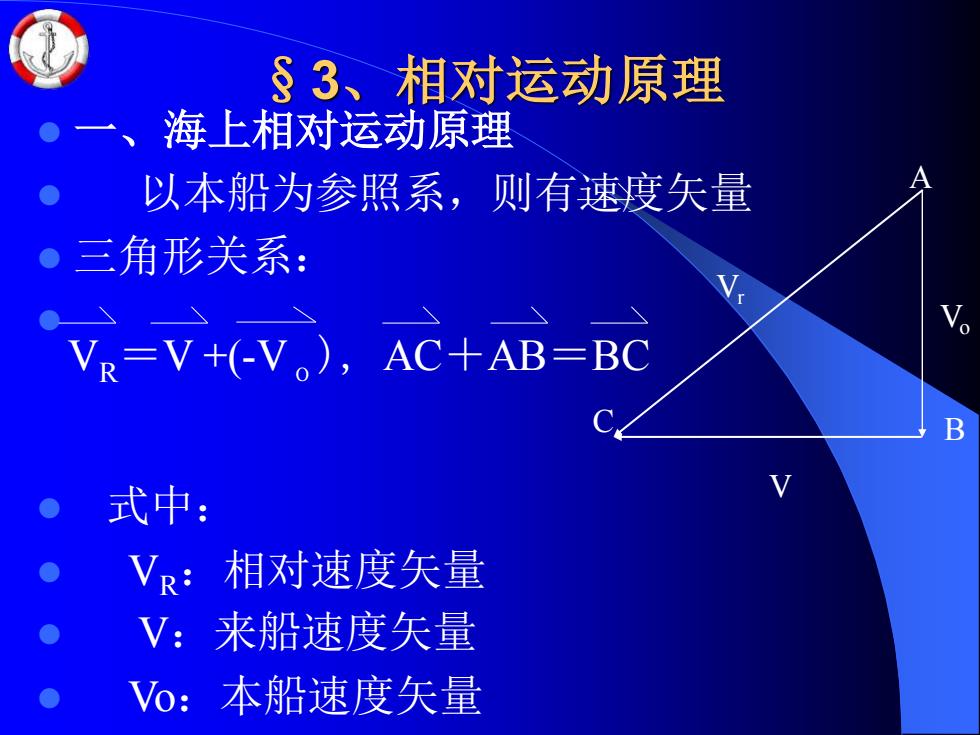
§3、相对运动原理 一、 海上相对运动原理 以本船为参照系,则有速度矢量 。三角形关系: VR=V+(-V。),AC十AB=BC 式中: VR:相对速度矢量 V:来船速度矢量 Vo:本船速度矢量
§3、相对运动原理 ⚫ 一、海上相对运动原理 ⚫ 以本船为参照系,则有速度矢量 ⚫ 三角形关系: ⚫ ⚫ 式中: ⚫ VR:相对速度矢量 ⚫ V:来船速度矢量 ⚫ Vo:本船速度矢量 VR =V +(-Vo), AC+AB=BC A C B Vr V Vo
在实际计算中,只要知道其中四个参 量,便可以通过图解法求取另外两个未知 参量,并且通过矢量三角形的变化,可求 取任何其他两个未知参量,从而完成雷达 标绘的目的。 ∴,作为船舶驾驶员,应能准确、迅速而 又熟练地掌握及运用这种原理来求取来靡 与本船的相对关系,并求取来船运动要素
⚫ 在实际计算中,只要知道其中四个参 量,便可以通过图解法求取另外两个未知 参量,并且通过矢量三角形的变化,可求 取任何其他两个未知参量,从而完成雷达 标绘的目的。 ⚫ ∴ 作为船舶驾驶员,应能准确、迅速而 又熟练地掌握及运用这种原理来求取来船 与本船的相对关系,并求取来船运动要素
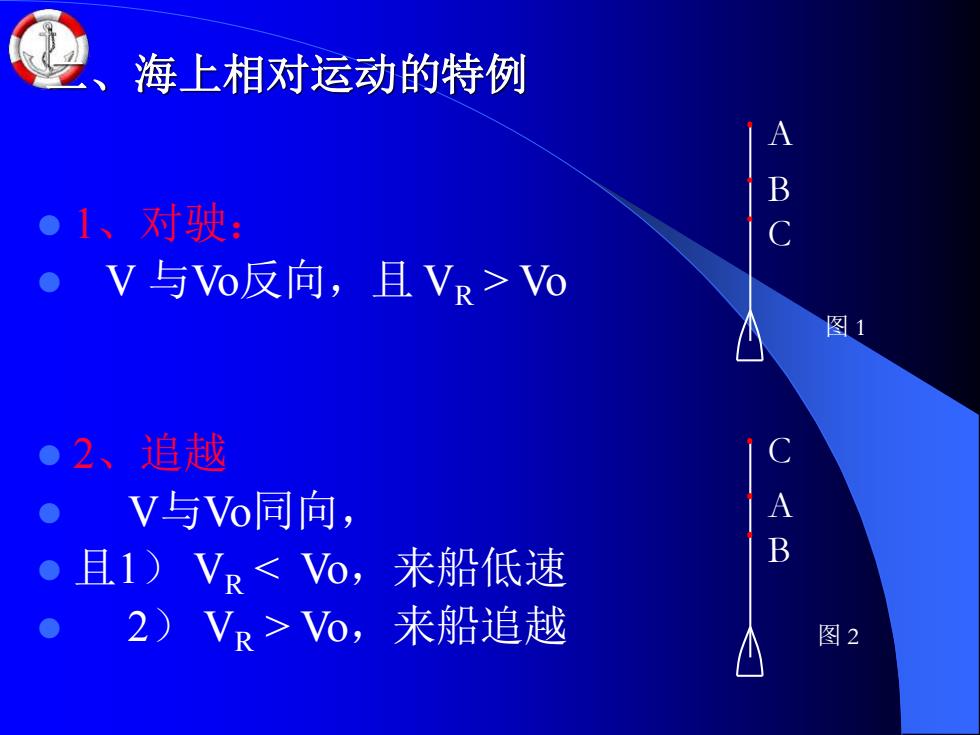
海上相对运动的特例 。1、对驶: m V V与o反向,且VR>Vo 图1 ·2、追越 V与Vo同向, A 。且1)VR<Vo,来船低速 B 2)VR>Vo,来船追越 图2
⚫ 1、对驶: ⚫ V 与Vo反向,且 VR > Vo ⚫ 2、追越 ⚫ V与Vo同向, ⚫ 且1) VR < Vo,来船低速 ⚫ 2) VR > Vo,来船追越 A B C C A B 图 1 图 2 二、海上相对运动的特例