2、仿人机器人应具备的条件: ·1)、具有脑、手、脚等三 ■ 要素的个体; ·2)、具有非接触传感器 (用眼、耳接受远方信 ·息)和接触传感器; ·3)、具有平衡觉和固有觉 的传感器
2、仿人机器人应具备的条件: 1 )、具有脑、手、脚等三 要素的个体; 2 )、具有非接触传感器 (用眼、耳接受远方信 息)和接触传感器; 3 )、具有平衡觉和固有觉 的传感器
3、机器人的由来 机器人一来自于1920年捷克斯洛伐克作家 卡佩克的一个科幻内容的小说,叫《罗萨姆 的机器人万能公司》。这本小说中他构思和 幻想了一个机器人,它的名字叫罗伯特 (Robota捷克文:苦力、劳仆),也就是我们 英文中的Robot,它可以不吃饭,它能够不知 疲劳的,不知疲倦地进行工作
3、机器人的由来 机器人——来自于1920年捷克斯洛伐克作家 卡佩克的一个科幻内容的小说, 叫《罗萨姆 的机器人万能公司》。这本小说中他构思和 幻想了一个机器人,它的名字叫罗伯特 ( Robota捷克文:苦力、劳仆),也就是我们 英文中的Robot,它可以不吃饭,它能够不知 疲劳的,不知疲倦地进行工作
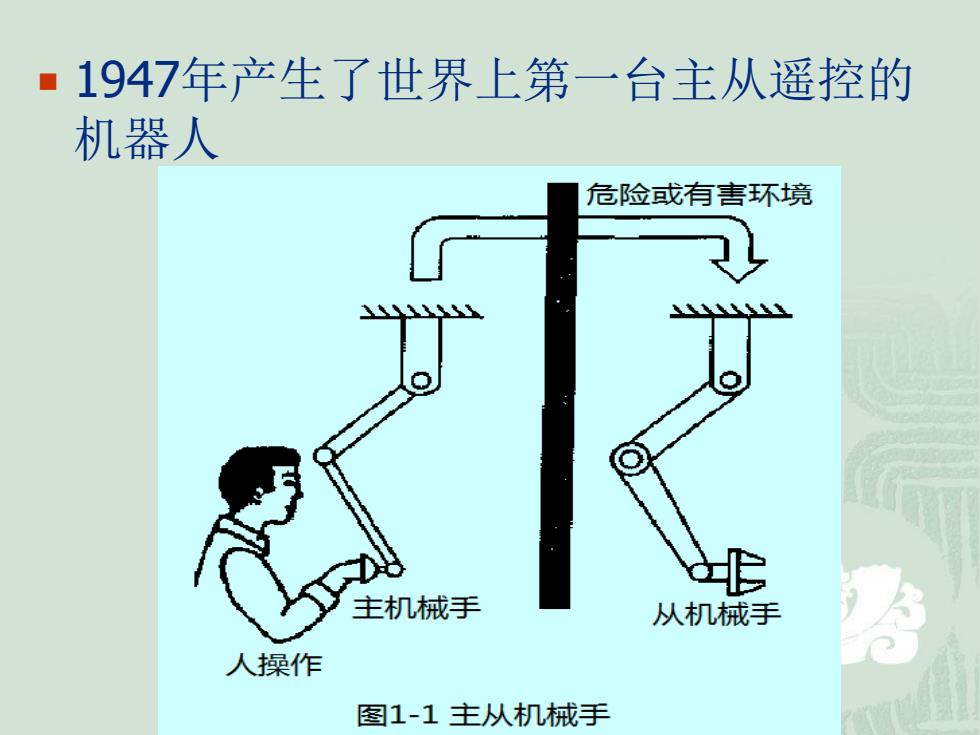
■1947年产生了世界上第一台主从遥控的 机器人 危险或有害环境 主机械手 从机械手 人操作 图1-1主从机械手
1947年产生了世界上第一台主从遥控的 机器人
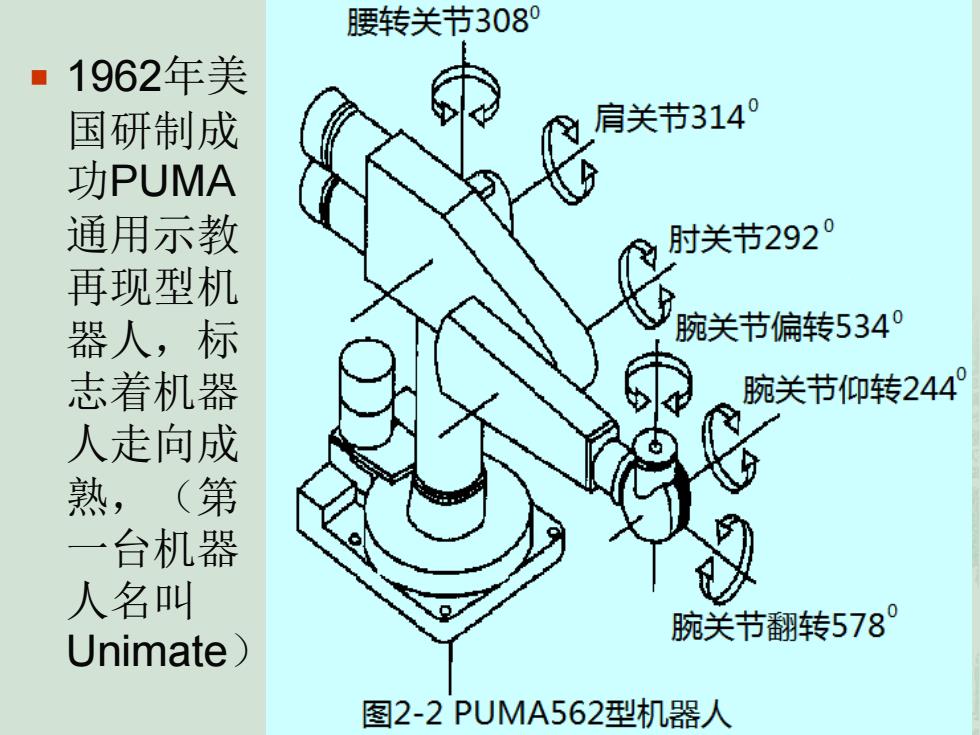
腰转关节3080 ·1962年美 国研制成 肩关节314° 功PUMA 通用示教 肘关节292° 再现型机 器人,标 腕关节偏转534° 志着机器 腕关节仰转244° 人走向成 熟,(第 一台机器 人名叫 腕关节翻转578 Unimate) 图2-2PUMA562型机器人
1962年美 国研制成 功PUMA 通用示教 再现型机 器人,标 志着机器 人走向成 熟,(第 一台机器 人名叫 Unimate)
4、机器人技术产生的背景: 0 1)、机器人技术的发展,是生产力发展需求的必 然结果,也是人类自身发展的必然结果。 2)、机器人技术的发展,是一个科学技术发展共 同的一个综合性的结果,同时,为社会经济 发展产生了一个重大影响的一门科学技术。 3)、电子技术,计算机技术以及制造技术等相关 技术的发展也为机器人技术提供了强大的技 术保证
4、机器人技术产生的背景: 1)、机器人技术的发展,是生产力发展需求的必 然结果,也是人类自身发展的必然结果。 2)、机器人技术的发展,是一个科学技术发展共 同的一个综合性的结果,同时,为社会经济 发展产生了一个重大影响的一门科学技术。 3)、电子技术,计算机技术以及制造技术等相关 技术的发展也为机器人技术提供了强大的技 术保证