
园 上游充通大学 eb口 LECTURE 5 Graphical Linkage Synthesis 1日 圈上泽庆大坐 OUTLINE Analysis OR Synthesis? Task of kinematic synthesis Graphical linkage synthesis Grashoff non-quick return crank-rocker Link thru 2 positions as rocker Link thru 2 positions as coupler Link thru 3 positions as coupler Grashoff quick return crank-rocker Six-bar quick return mechanism Crank-shaper quick return Quick return crank-slider mechanism Three positions function linkage More with coupler curves ME357 Design Manufacturing ll
Graphical Linkage Synthesis LECTURE 5 ME357 Design & Manufacturing II OUTLINE Analysis OR Synthesis? Task of kinematic synthesis Graphical linkage synthesis • Grashoff non-quick return crank-rocker • Link thru 2 positions as rocker • Link thru 2 positions as coupler • Link thru 3 positions as coupler • Grashoff quick return crank-rocker • Six-bar quick return mechanism • Crank-shaper quick return • Quick return crank-slider mechanism • Three positions function linkage • More with coupler curves
国上活人峰 Analysis OR Synthesis Analysis or Synthesis-A generic view + (Uni-directional iterative among multiple points) Synthesis Analysis Synthesis X1 X3 Y3 The Design Space The Performance Space (Sets of design parameters X (Sets of performance parameters Y and their specification ranges) and their requirement ranges) 上海充通大学 Film 国 Tin =Fin Tin Tout=Fout rout Lo Fout rock 重 aoeds
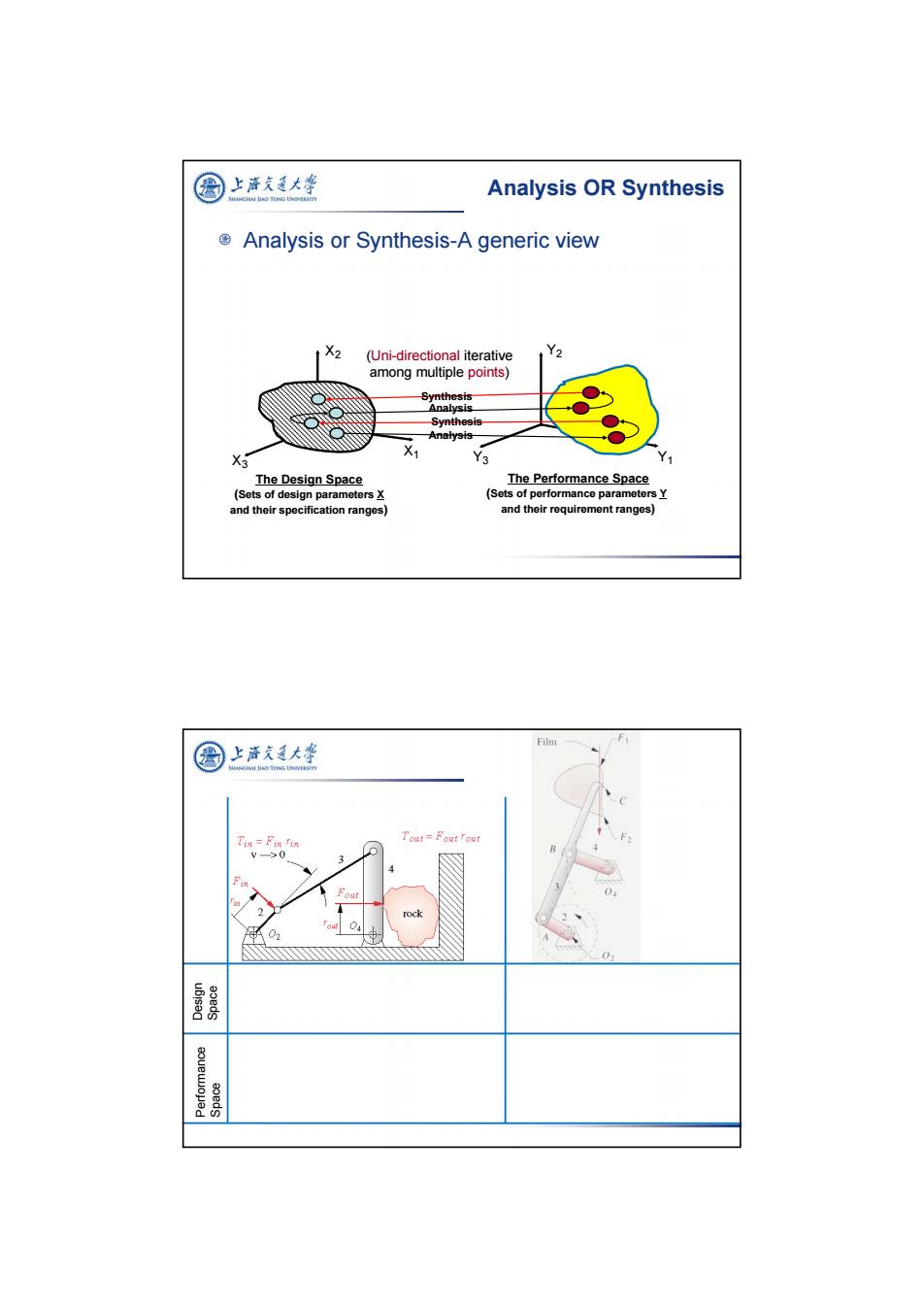
Analysis or Synthesis-A generic view Y3 X2 X1 X3 Y2 Y1 The Design Space (Sets of design parameters X and their specification ranges) The Performance Space (Sets of performance parameters Y and their requirement ranges) Synthesis Analysis Synthesis Analysis (Uni-directional iterative among multiple points) Analysis OR Synthesis Design Space Performance Space

园 上泽克通大¥ Task of kinematic synthesis Basic 4-Bar linkage Applicatione Belt 1 Belt2 1.Most important step is to clarify the performance Pat色【enerator requirements with motions 2.The motions can be modeled graphically or analytically. 位 圆上泽夫大坐 Kinematic Synthesis Design a mechanism to satisfy particular motion requirements. Follow a particular path(Generation) Be of a certain orientation at particular points Generation) Functional relationship btwn input and output(linear to linear linear to rotational,rotational to linear,rotational to rotational) _Generation) Other considerations?: ·Full crank rotation Space Constraints ·Transmission Angle Mechanical Advantage
Task of kinematic synthesis 1. Most important step is to clarify the performance requirements with motions. 2. The motions can be modeled graphically or analytically. Ⅰ Ⅱ D Kinematic Synthesis Design a mechanism to satisfy particular motion requirements. • Follow a particular path (Path Generation) • Be of a certain orientation at particular points (Motion Generation) • Functional relationship btwn input and output (linear to linear, linear to rotational, rotational to linear, rotational to rotational) (Function Generation) Other considerations?: • Full crank rotation • Space Constraints • Transmission Angle • Mechanical Advantage
上活我大峰 Graphical linkage synthesis 1 Grashoff non-quick return crank-rocker Draw O,B in two Link 3 extreme positions Draw chord B.B2 in Link 2 either direction Select point O2 。 Bisect B,B,and draw circle of that radius at 02 0 Crank-O,A,Coupler AB Rocker O,B,Ground 0204 09 Your choice 圈上泽庆大坐 Graphical linkage synthesis 1.Grashoff non-quick return crank-rocker (b)Finished linkage Link 3 Link 2 B Link 4 Link Link 3 8
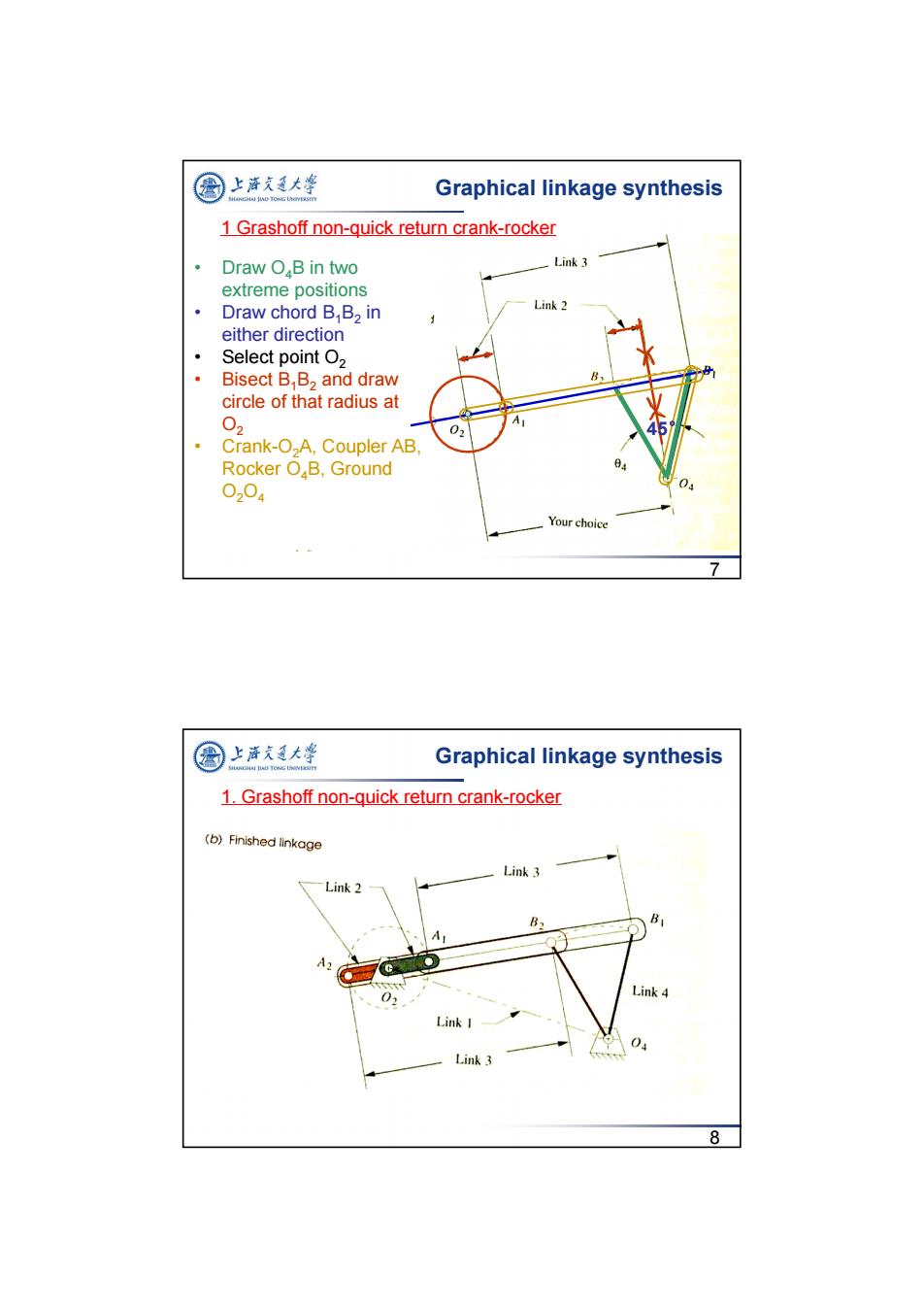
Graphical linkage synthesis 7 • Draw O4B in two extreme positions • Draw chord B1B2 in either direction • Select point O2 • Bisect B1B2 and draw circle of that radius at O2 • Crank-O2A, Coupler AB, Rocker O4B, Ground O2O4 45° 1 Grashoff non-quick return crank-rocker 8 1. Grashoff non-quick return crank-rocker Graphical linkage synthesis
国上活大峰 Graphical linkage synthesis 2.Link thru 2 positions as rocker Want to move from C,D,to C2D2 ⊕ Construct perpendicular bisectors C C2 and D D2 Intersection of the bisectors is the rotopole (the ground B location) The output link is shown in Link 4 its two positions Rotopole 9 国 上游充通大学 Graphical linkage synthesis 2.Link thru 2 positions as rocker You can add a dyad by picking point B on the output link Link 4 -D1 Link 2 A Link 3 B1.Q -01 Link I Rotopole
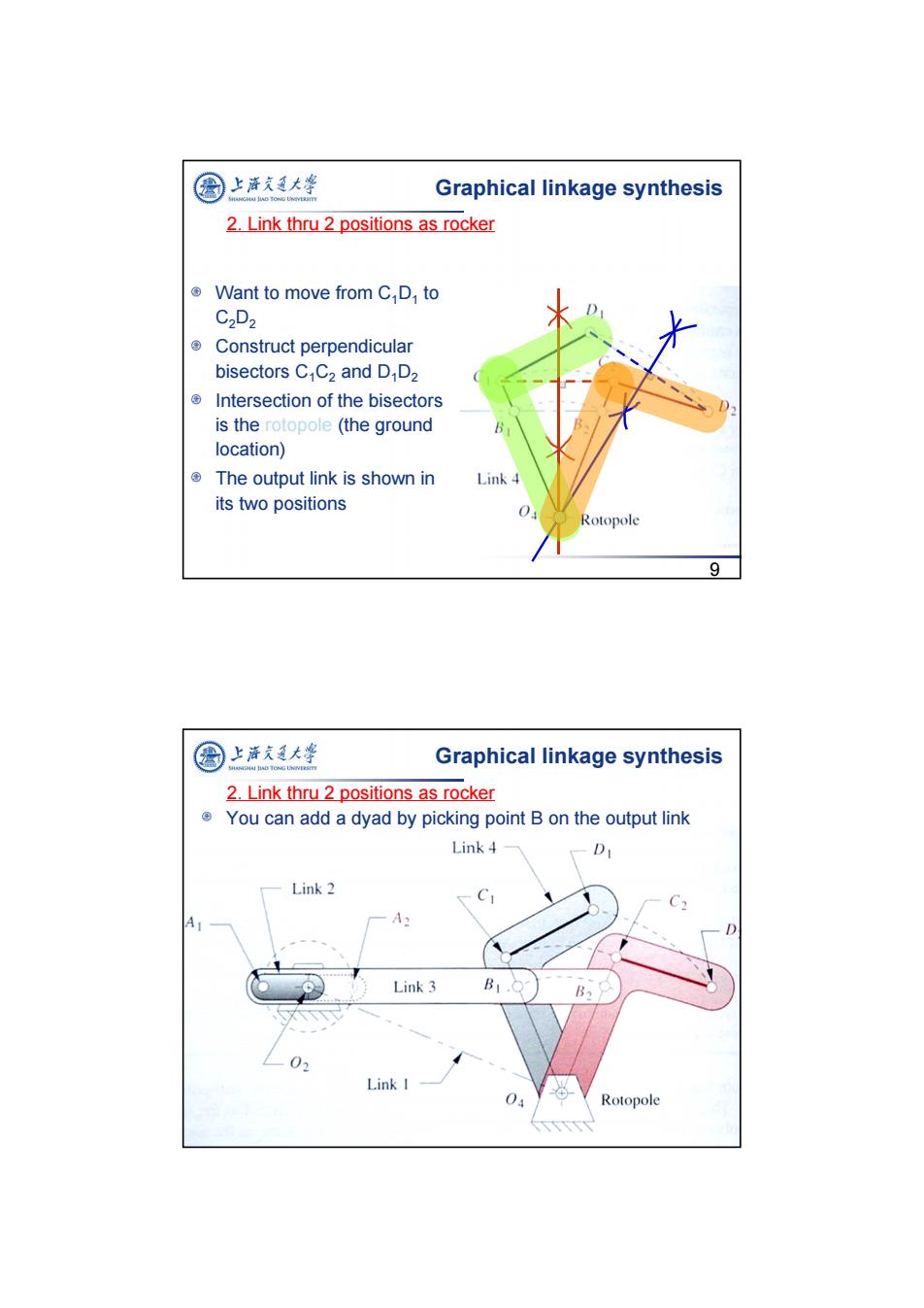
9 Want to move from C1D1 to C2D2 Construct perpendicular bisectors C1C2 and D1D2 Intersection of the bisectors is the rotopole (the ground location) The output link is shown in its two positions 2. Link thru 2 positions as rocker Graphical linkage synthesis 10 You can add a dyad by picking point B on the output link 2. Link thru 2 positions as rocker Graphical linkage synthesis