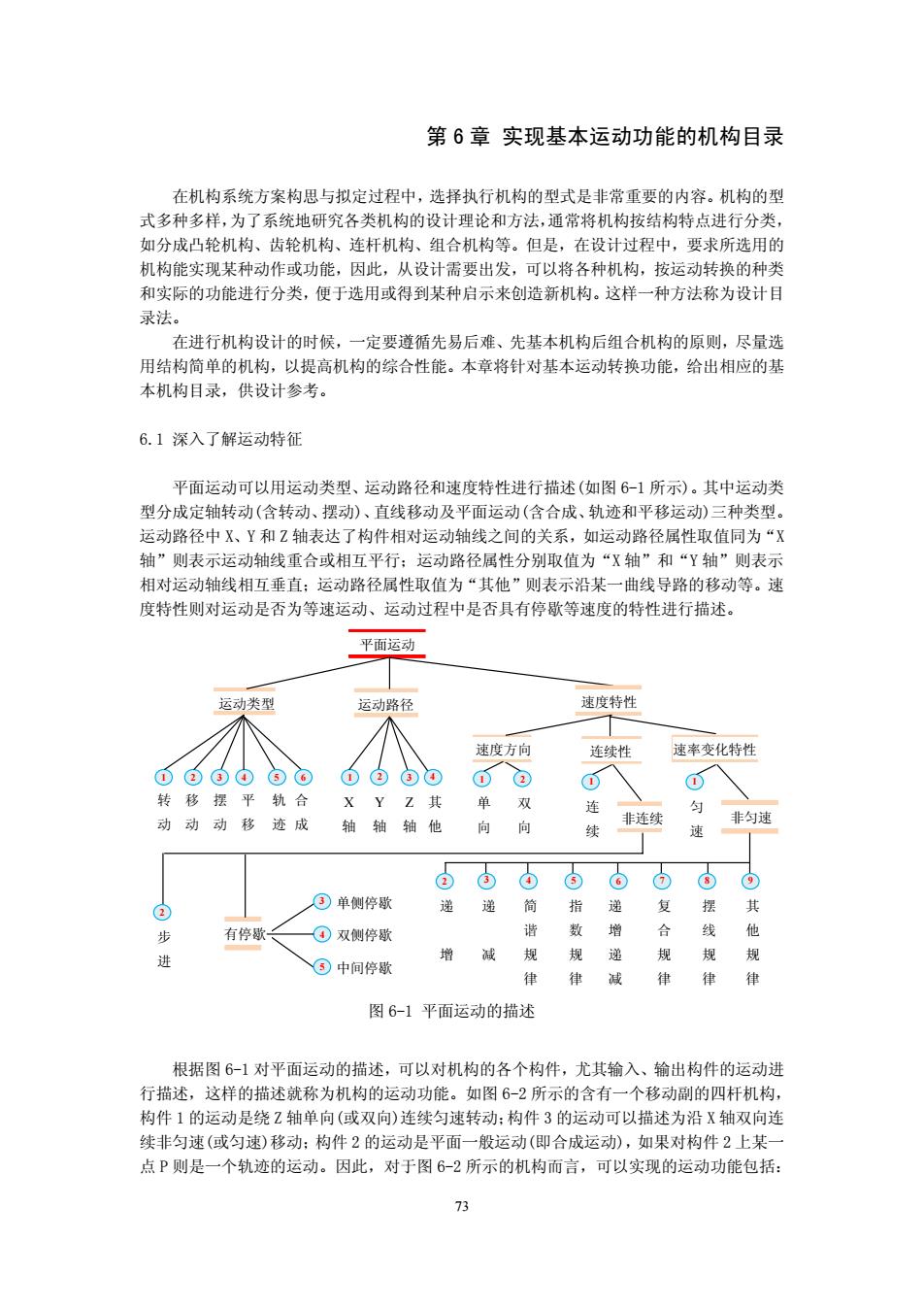
第6章实现基本运动功能的机构目录 在机构系统方案构思与拟定过程中,选择执行机构的型式是非常重要的内容。机构的型 式多种多样,为了系统地研究各类机构的设计理论和方法,通常将机构按结构特点进行分类, 如分成凸轮机构、齿轮机构、连杆机构、组合机构等。但是,在设计过程中,要求所选用的 机构能实现某种动作或功能,因此,从设计需要出发,可以将各种机构,按运动转换的种类 和实际的功能进行分类,便于选用或得到某种启示来创造新机构。这样一种方法称为设计目 录法。 在进行机构设计的时候,一定要遵循先易后难、先基本机构后组合机构的原则,尽量选 用结构简单的机构,以提高机构的综合性能。本章将针对基本运动转换功能,给出相应的基 本机构目录,供设计参考。 6.1深入了解运动特征 平面运动可以用运动类型、运动路径和速度特性进行描述(如图6-1所示)。其中运动类 型分成定轴转动(含转动、摆动)、直线移动及平面运动(含合成、轨迹和平移运动)三种类型。 运动路径中X、Y和Z轴表达了构件相对运动轴线之间的关系,如运动路径属性取值同为“X 轴”则表示运动轴线重合或相互平行:运动路径属性分别取值为“X轴”和“Y轴”则表示 相对运动轴线相互垂直:运动路径属性取值为“其他”则表示沿某一曲线导路的移动等。速 度特性则对运动是否为等速运动、运动过程中是否具有停歇等速度的特性进行描述。 平面运动 运动类型 运动路径 速度特性 速度方向 连续性 速率变化特性 ①②③①⑧⑥ ① ① ⊙ ① 转移摆平轨合 XYZ其 袋 年 的 匀 动动动移迹成 轴轴轴他 非连续 非匀速 向 向 续 速 ③ ④ ⑥ ① ③单侧停歇 2 曾 世 简 指 递 复 摆 其 步 有停歇 ①双侧停歇 谐 数 增 合 线 他 增 空 单 规 必 规 色 规 ③中间停歇 律 律 减 律 律 律 图6-1平面运动的描述 根据图6-1对平面运动的描述,可以对机构的各个构件,尤其输入、输出构件的运动进 行描述,这样的描述就称为机构的运动功能。如图6-2所示的含有一个移动副的四杆机构, 构件1的运动是绕Z轴单向(或双向)连续匀速转动:构件3的运动可以描述为沿X轴双向连 续非匀速(或匀速)移动:构件2的运动是平面一般运动(即合成运动),如果对构件2上某一 点P则是一个轨迹的运动。因此,对于图6-2所示的机构而言,可以实现的运动功能包括: 73
73 第 6 章 实现基本运动功能的机构目录 在机构系统方案构思与拟定过程中,选择执行机构的型式是非常重要的内容。机构的型 式多种多样,为了系统地研究各类机构的设计理论和方法,通常将机构按结构特点进行分类, 如分成凸轮机构、齿轮机构、连杆机构、组合机构等。但是,在设计过程中,要求所选用的 机构能实现某种动作或功能,因此,从设计需要出发,可以将各种机构,按运动转换的种类 和实际的功能进行分类,便于选用或得到某种启示来创造新机构。这样一种方法称为设计目 录法。 在进行机构设计的时候,一定要遵循先易后难、先基本机构后组合机构的原则,尽量选 用结构简单的机构,以提高机构的综合性能。本章将针对基本运动转换功能,给出相应的基 本机构目录,供设计参考。 6.1 深入了解运动特征 平面运动可以用运动类型、运动路径和速度特性进行描述(如图 6-1 所示)。其中运动类 型分成定轴转动(含转动、摆动)、直线移动及平面运动(含合成、轨迹和平移运动)三种类型。 运动路径中 X、Y 和 Z 轴表达了构件相对运动轴线之间的关系,如运动路径属性取值同为“X 轴”则表示运动轴线重合或相互平行;运动路径属性分别取值为“X 轴”和“Y 轴”则表示 相对运动轴线相互垂直;运动路径属性取值为“其他”则表示沿某一曲线导路的移动等。速 度特性则对运动是否为等速运动、运动过程中是否具有停歇等速度的特性进行描述。 根据图 6-1 对平面运动的描述,可以对机构的各个构件,尤其输入、输出构件的运动进 行描述,这样的描述就称为机构的运动功能。如图 6-2 所示的含有一个移动副的四杆机构, 构件 1 的运动是绕 Z 轴单向(或双向)连续匀速转动;构件 3 的运动可以描述为沿 X 轴双向连 续非匀速(或匀速)移动;构件 2 的运动是平面一般运动(即合成运动),如果对构件 2 上某一 点 P 则是一个轨迹的运动。因此,对于图 6-2 所示的机构而言,可以实现的运动功能包括: 转 动 运动类型 运动路径 速度特性 平面运动 移 动 摆 动 平 移 轨 迹 X 轴 Y 轴 速度方向 非连续 非匀速 有停歇 1 2 3 4 5 1 2 3 1 2 1 2 3 4 5 1 2 3 4 5 6 7 8 9 图 6-1 平面运动的描述 合 成 6 连续性 速率变化特性 其 他 连 续 双 向 单 向 匀 速 步 进 中间停歇 双侧停歇 单侧停歇 递 增 递 减 简 谐 规 律 指 数 规 律 递 增 递 减 复 合 规 律 摆 线 规 律 其 他 规 律 Z 轴 4
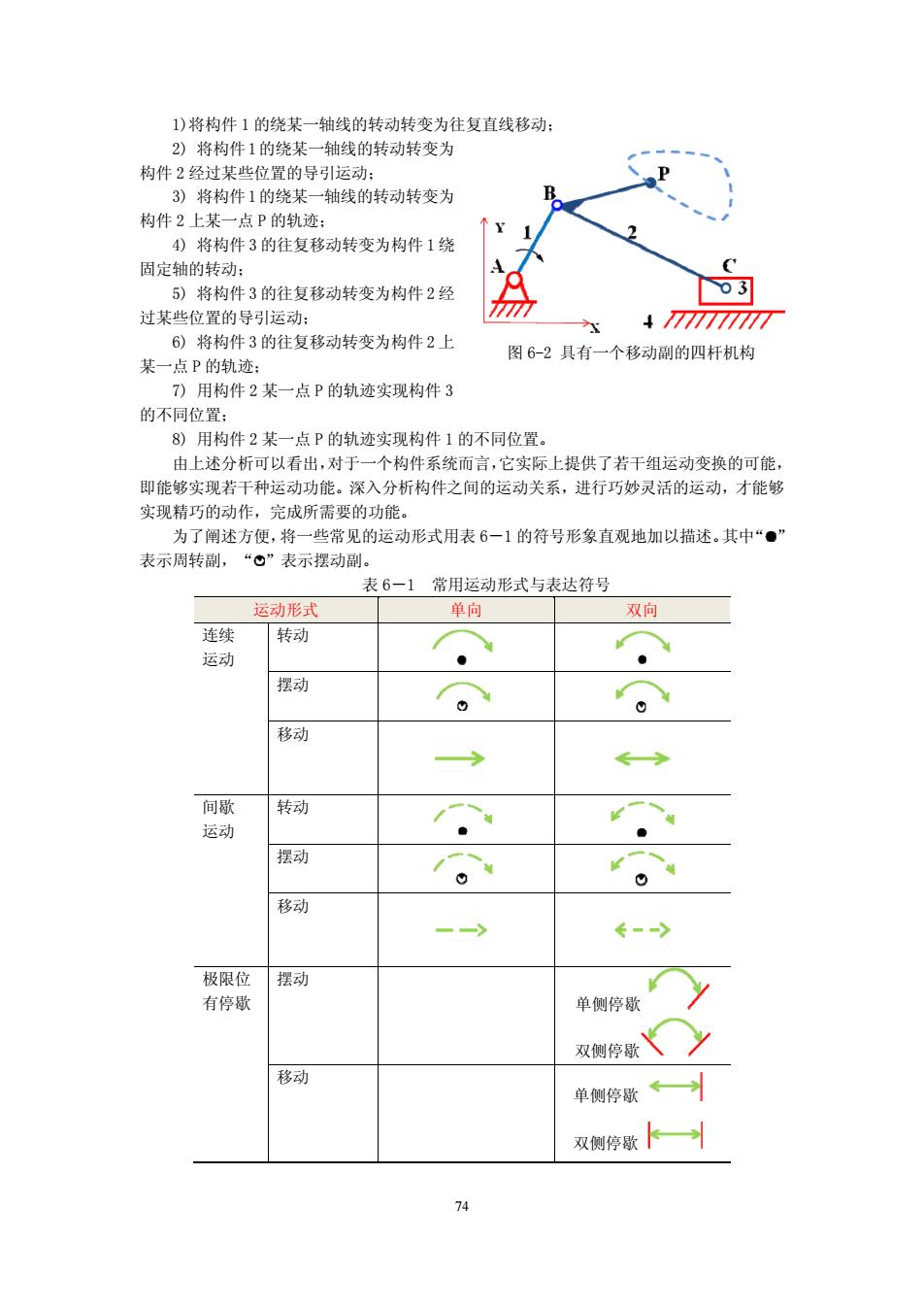
1)将构件1的绕某一轴线的转动转变为往复直线移动: 2)将构件1的绕某一轴线的转动转变为 构件2经过某些位置的导引运动: 3)将构件1的绕某一轴线的转动转变为 构件2上某一点P的轨迹: 4)将构件3的往复移动转变为构件1绕 固定轴的转动: 5)将构件3的往复移动转变为构件2经 3 过某些位置的导引运动: +777777 6)将构件3的往复移动转变为构件2上 图6-2具有一个移动副的四杆机构 某一点P的轨迹: 7)用构件2某一点P的轨迹实现构件3 的不同位置: 8)用构件2某一点P的轨迹实现构件1的不同位置。 由上述分析可以看出,对于一个构件系统而言,它实际上提供了若干组运动变换的可能, 即能够实现若干种运动功能。深入分析构件之间的运动关系,进行巧妙灵活的运动,才能够 实现精巧的动作,完成所需要的功能。 为了阐述方便,将一些常见的运动形式用表6一1的符号形象直观地加以描述。其中“●” 表示周转副,“⊙”表示摆动副。 表6一1常用运动形式与表达符号 运动形式 单向 双向 连续 转动 运动 ● 摆动 移动 ←) 间歇 转动 运动 摆动 移动 ←=> 极限位 摆动 有停歇 单侧停歇 双侧停歇 移动 单侧停歇 双侧停歇 74
74 1)将构件 1 的绕某一轴线的转动转变为往复直线移动; 2) 将构件 1的绕某一轴线的转动转变为 构件 2 经过某些位置的导引运动; 3) 将构件 1的绕某一轴线的转动转变为 构件 2 上某一点 P 的轨迹; 4) 将构件 3 的往复移动转变为构件 1 绕 固定轴的转动; 5) 将构件 3 的往复移动转变为构件 2 经 过某些位置的导引运动; 6) 将构件 3 的往复移动转变为构件 2 上 某一点 P 的轨迹; 7) 用构件 2 某一点 P 的轨迹实现构件 3 的不同位置; 8) 用构件 2 某一点 P 的轨迹实现构件 1 的不同位置。 由上述分析可以看出,对于一个构件系统而言,它实际上提供了若干组运动变换的可能, 即能够实现若干种运动功能。深入分析构件之间的运动关系,进行巧妙灵活的运动,才能够 实现精巧的动作,完成所需要的功能。 为了阐述方便,将一些常见的运动形式用表 6-1 的符号形象直观地加以描述。其中“ ” 表示周转副,“ ”表示摆动副。 表 6-1 常用运动形式与表达符号 运动形式 单向 双向 连续 运动 转动 摆动 移动 间歇 运动 转动 摆动 移动 极限位 有停歇 摆动 单侧停歇 双侧停歇 移动 单侧停歇 双侧停歇 图 6-2 具有一个移动副的四杆机构
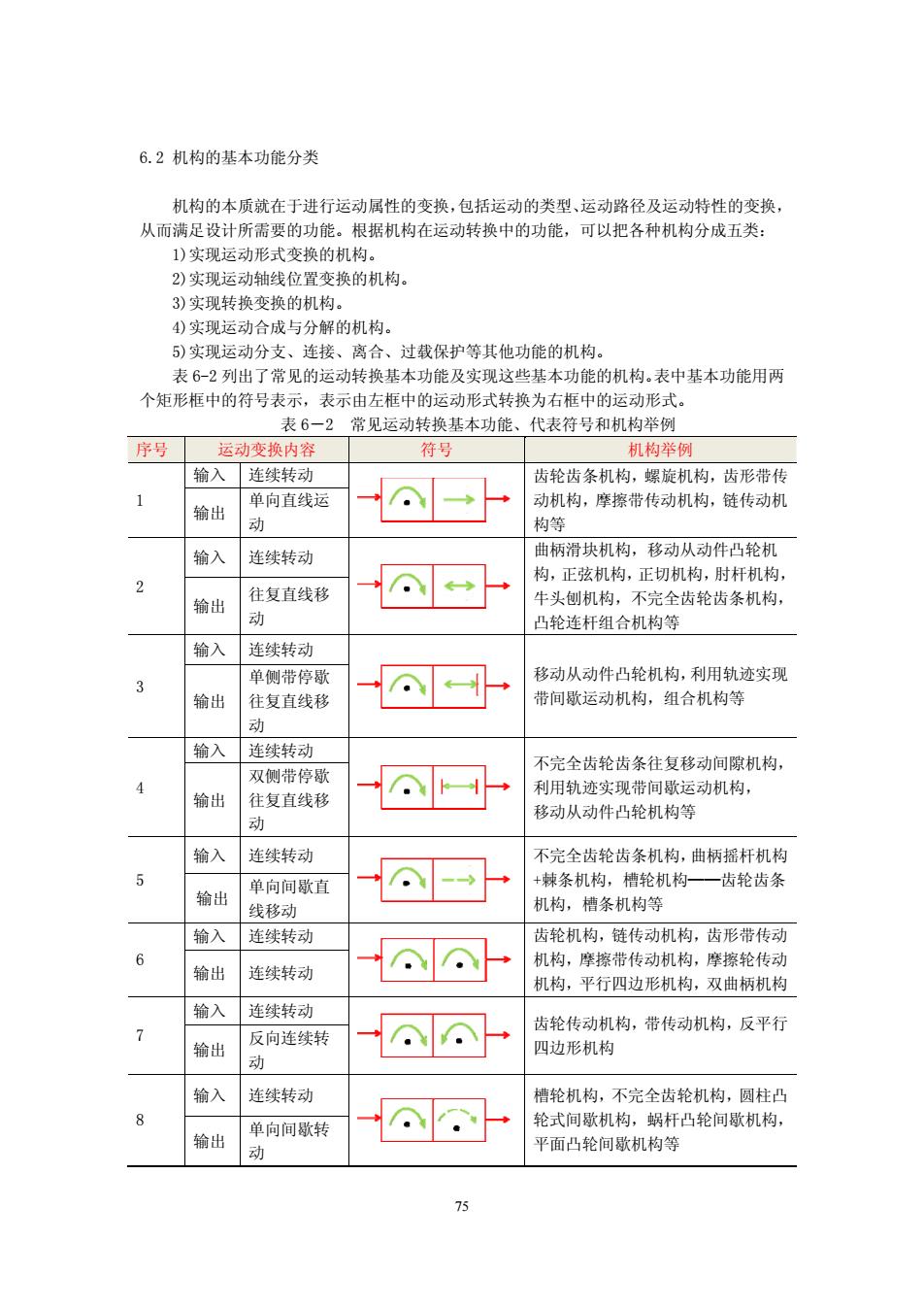
6.2机构的基本功能分类 机构的本质就在于进行运动属性的变换,包括运动的类型、运动路径及运动特性的变换, 从而满足设计所需要的功能。根据机构在运动转换中的功能,可以把各种机构分成五类: 1)实现运动形式变换的机构。 2)实现运动轴线位置变换的机构。 3)实现转换变换的机构。 4)实现运动合成与分解的机构。 5)实现运动分支、连接、离合、过载保护等其他功能的机构。 表6-2列出了常见的运动转换基本功能及实现这些基本功能的机构。表中基本功能用两 个矩形框中的符号表示,表示由左框中的运动形式转换为右框中的运动形式。 表6一2常见运动转换基本功能、 代表符号和机构举例 序号 运动变换内容 符号 机构举例 输入 连续转动 齿轮齿条机构,螺旋机构,齿形带传 单向直线运 动机构,摩擦带传动机构,链传动机 输出 动 构等 输入 连续转动 曲柄滑块机构,移动从动件凸轮机 构,正弦机构,正切机构,肘杆机构, 往复直线移 输出 牛头刨机构,不完全齿轮齿条机构, 动 凸轮连杆组合机构等 输入 连续转动 单侧带停歇 移动从动件凸轮机构,利用轨迹实现 输出 往复直线移 带间歇运动机构,组合机构等 动 输入 连续转动 不完全齿轮齿条往复移动间隙机构, 双侧带停歇 利用轨迹实现带间歇运动机构, 输出 往复直线移 移动从动件凸轮机构等 动 输入 连续转动 不完全齿轮齿条机构,曲柄摇杆机构 输出 单向间歇直 +棘条机构,槽轮机构一一齿轮齿条 线移动 机构,槽条机构等 输入 连续转动 齿轮机构,链传动机构,齿形带传动 6 机构,摩擦带传动机构,摩擦轮传动 输出 连续转动 机构,平行四边形机构,双曲柄机构 输入 连续转动 齿轮传动机构,带传动机构,反平行 反向连续转 输出 四边形机构 动 输入 连续转动 槽轮机构,不完全齿轮机构,圆柱凸 8 单向间歇转 轮式间歇机构,蜗杆凸轮间歇机构, 输出 动 平面凸轮间歇机构等 75
75 6.2 机构的基本功能分类 机构的本质就在于进行运动属性的变换,包括运动的类型、运动路径及运动特性的变换, 从而满足设计所需要的功能。根据机构在运动转换中的功能,可以把各种机构分成五类: 1)实现运动形式变换的机构。 2)实现运动轴线位置变换的机构。 3)实现转换变换的机构。 4)实现运动合成与分解的机构。 5)实现运动分支、连接、离合、过载保护等其他功能的机构。 表 6-2 列出了常见的运动转换基本功能及实现这些基本功能的机构。表中基本功能用两 个矩形框中的符号表示,表示由左框中的运动形式转换为右框中的运动形式。 表 6-2 常见运动转换基本功能、代表符号和机构举例 序号 运动变换内容 符号 机构举例 1 输入 连续转动 齿轮齿条机构,螺旋机构,齿形带传 动机构,摩擦带传动机构,链传动机 构等 输出 单向直线运 动 2 输入 连续转动 曲柄滑块机构,移动从动件凸轮机 构,正弦机构,正切机构,肘杆机构, 牛头刨机构,不完全齿轮齿条机构, 凸轮连杆组合机构等 输出 往复直线移 动 3 输入 连续转动 移动从动件凸轮机构,利用轨迹实现 输出 带间歇运动机构,组合机构等 单侧带停歇 往复直线移 动 4 输入 连续转动 不完全齿轮齿条往复移动间隙机构, 利用轨迹实现带间歇运动机构, 移动从动件凸轮机构等 输出 双侧带停歇 往复直线移 动 5 输入 连续转动 不完全齿轮齿条机构,曲柄摇杆机构 +棘条机构,槽轮机构——齿轮齿条 输出 机构,槽条机构等 单向间歇直 线移动 6 输入 连续转动 齿轮机构,链传动机构,齿形带传动 机构,摩擦带传动机构,摩擦轮传动 机构,平行四边形机构,双曲柄机构 输出 连续转动 7 输入 连续转动 齿轮传动机构,带传动机构,反平行 输出 四边形机构 反向连续转 动 8 输入 连续转动 槽轮机构,不完全齿轮机构,圆柱凸 轮式间歇机构,蜗杆凸轮间歇机构, 输出 平面凸轮间歇机构等 单向间歇转 动
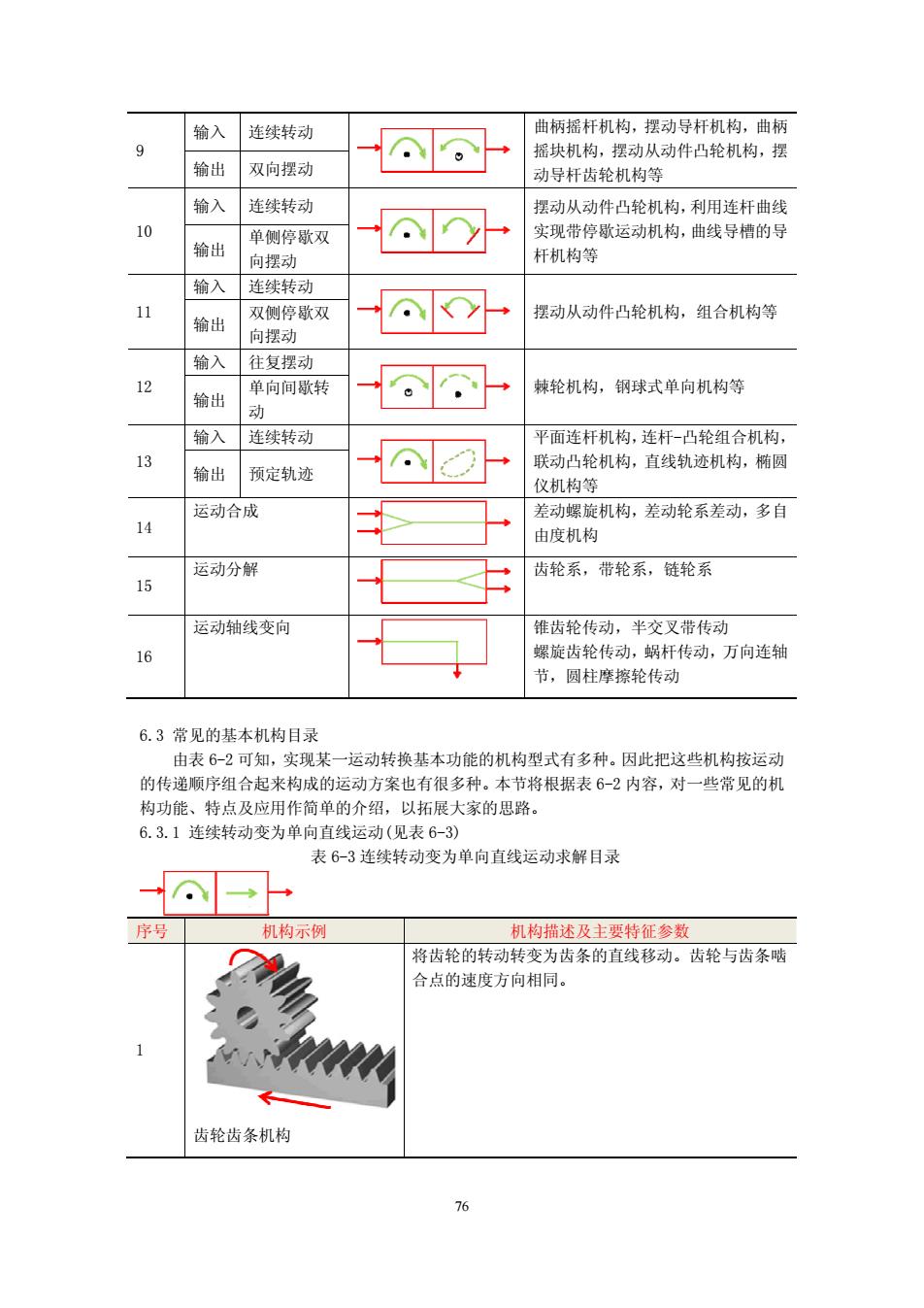
输入 连续转动 曲柄摇杆机构,摆动导杆机构,曲柄 9 摇块机构,摆动从动件凸轮机构,摆 输出 双向摆动 动导杆齿轮机构等 输入 连续转动 摆动从动件凸轮机构,利用连杆曲线 10 单侧停歇双 实现带停歇运动机构,曲线导槽的导 输出 向摆动 杆机构等 输入 连续转动 11 双侧停歇双 摆动从动件凸轮机构,组合机构等 输出 向摆动 输入 往复摆动 12 单向间歇转 棘轮机构,钢球式单向机构等 输出 动 输入 连续转动 平面连杆机构,连杆-凸轮组合机构, 13 联动凸轮机构,直线轨迹机构,椭圆 输出 预定轨迹 仪机构等 运动合成 差动螺旋机构,差动轮系差动,多自 14 由度机构 运动分解 齿轮系,带轮系,链轮系 15 运动轴线变向 锥齿轮传动,半交叉带传动 16 螺旋齿轮传动,蜗杆传动,万向连轴 节,圆柱摩擦轮传动 6.3常见的基本机构目录 由表6-2可知,实现某一运动转换基本功能的机构型式有多种。因此把这些机构按运动 的传递顺序组合起来构成的运动方案也有很多种。本节将根据表6-2内容,对一些常见的机 构功能、特点及应用作简单的介绍,以拓展大家的思路。 6.3.1连续转动变为单向直线运动(见表6-3) 表6-3连续转动变为单向直线运动求解目录 序号 机构示例 机构描述及主要特征参数 将齿轮的转动转变为齿条的直线移动。齿轮与齿条啮 合点的速度方向相同。 齿轮齿条机构 76
76 9 输入 连续转动 曲柄摇杆机构,摆动导杆机构,曲柄 摇块机构,摆动从动件凸轮机构,摆 输出 双向摆动 动导杆齿轮机构等 10 输入 连续转动 摆动从动件凸轮机构,利用连杆曲线 实现带停歇运动机构,曲线导槽的导 输出 杆机构等 单侧停歇双 向摆动 11 输入 连续转动 摆动从动件凸轮机构,组合机构等 输出 双侧停歇双 向摆动 12 输入 往复摆动 棘轮机构,钢球式单向机构等 输出 单向间歇转 动 13 输入 连续转动 平面连杆机构,连杆-凸轮组合机构, 联动凸轮机构,直线轨迹机构,椭圆 仪机构等 输出 预定轨迹 14 运动合成 差动螺旋机构,差动轮系差动,多自 由度机构 15 运动分解 齿轮系,带轮系,链轮系 16 运动轴线变向 锥齿轮传动,半交叉带传动 螺旋齿轮传动,蜗杆传动,万向连轴 节,圆柱摩擦轮传动 6.3 常见的基本机构目录 由表 6-2 可知,实现某一运动转换基本功能的机构型式有多种。因此把这些机构按运动 的传递顺序组合起来构成的运动方案也有很多种。本节将根据表 6-2 内容,对一些常见的机 构功能、特点及应用作简单的介绍,以拓展大家的思路。 6.3.1 连续转动变为单向直线运动(见表 6-3) 表 6-3 连续转动变为单向直线运动求解目录 序号 机构示例 机构描述及主要特征参数 1 齿轮齿条机构 将齿轮的转动转变为齿条的直线移动。齿轮与齿条啮 合点的速度方向相同
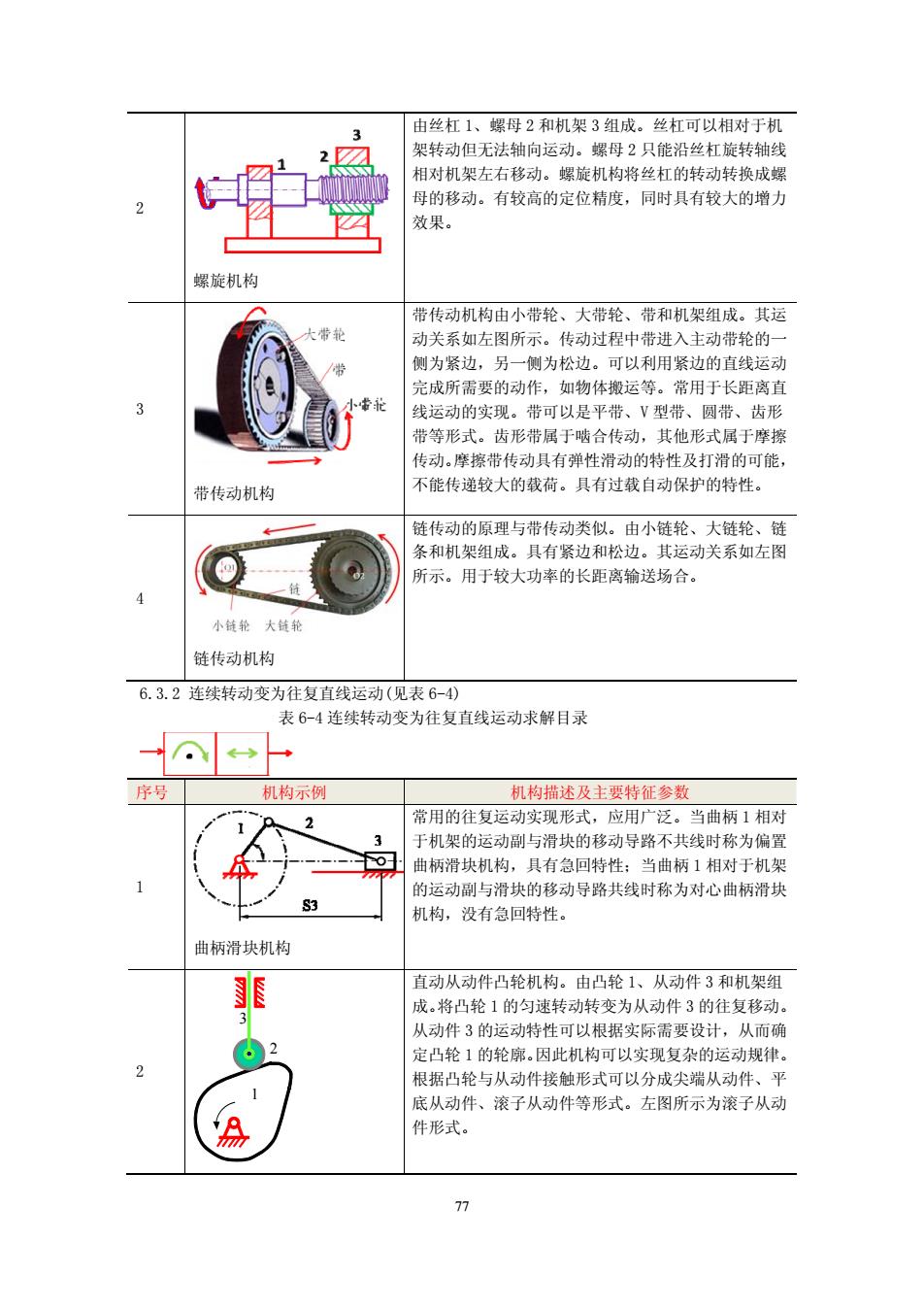
由丝杠1、螺母2和机架3组成。丝杠可以相对于机 2☑ 架转动但无法轴向运动。螺母2只能沿丝杠旋转轴线 相对机架左右移动。螺旋机构将丝杠的转动转换成螺 母的移动。有较高的定位精度,同时具有较大的增力 效果。 螺旋机构 带传动机构由小带轮、大带轮、带和机架组成。其运 动关系如左图所示。传动过程中带进入主动带轮的一 带 侧为紧边,另一侧为松边。可以利用紧边的直线运动 完成所需要的动作,如物体搬运等。常用于长距离直 线运动的实现。带可以是平带、V型带、圆带、齿形 带等形式。齿形带属于啮合传动,其他形式属于摩擦 传动。摩擦带传动具有弹性滑动的特性及打滑的可能, 带传动机构 不能传递较大的载荷。具有过载自动保护的特性。 链传动的原理与带传动类似。由小链轮、大链轮、链 条和机架组成。具有紧边和松边。其运动关系如左图 所示。用于较大功率的长距离输送场合。 小链轮大链轮 链传动机构 6.3.2连续转动变为往复直线运动(见表6-4) 表6-4连续转动变为往复直线运动求解目录 序号 机构示例 机构描述及主要特征参数 2 常用的往复运动实现形式,应用广泛。当曲柄1相对 于机架的运动副与滑块的移动导路不共线时称为偏置 曲柄滑块机构,具有急回特性:当曲柄1相对于机架 的运动副与滑块的移动导路共线时称为对心曲柄滑块 机构,没有急回特性。 曲柄滑块机构 直动从动件凸轮机构。由凸轮1、从动件3和机架组 成。将凸轮1的匀速转动转变为从动件3的往复移动。 从动件3的运动特性可以根据实际需要设计,从而确 定凸轮1的轮廓。因此机构可以实现复杂的运动规律。 根据凸轮与从动件接触形式可以分成尖端从动件、平 底从动件、滚子从动件等形式。左图所示为滚子从动 件形式。 77
77 2 螺旋机构 由丝杠 1、螺母 2 和机架 3 组成。丝杠可以相对于机 架转动但无法轴向运动。螺母 2 只能沿丝杠旋转轴线 相对机架左右移动。螺旋机构将丝杠的转动转换成螺 母的移动。有较高的定位精度,同时具有较大的增力 效果。 3 带传动机构 带传动机构由小带轮、大带轮、带和机架组成。其运 动关系如左图所示。传动过程中带进入主动带轮的一 侧为紧边,另一侧为松边。可以利用紧边的直线运动 完成所需要的动作,如物体搬运等。常用于长距离直 线运动的实现。带可以是平带、V 型带、圆带、齿形 带等形式。齿形带属于啮合传动,其他形式属于摩擦 传动。摩擦带传动具有弹性滑动的特性及打滑的可能, 不能传递较大的载荷。具有过载自动保护的特性。 4 链传动机构 链传动的原理与带传动类似。由小链轮、大链轮、链 条和机架组成。具有紧边和松边。其运动关系如左图 所示。用于较大功率的长距离输送场合。 6.3.2 连续转动变为往复直线运动(见表 6-4) 表 6-4 连续转动变为往复直线运动求解目录 序号 机构示例 机构描述及主要特征参数 1 曲柄滑块机构 常用的往复运动实现形式,应用广泛。当曲柄 1 相对 于机架的运动副与滑块的移动导路不共线时称为偏置 曲柄滑块机构,具有急回特性;当曲柄 1 相对于机架 的运动副与滑块的移动导路共线时称为对心曲柄滑块 机构,没有急回特性。 2 1 2 3 直动从动件凸轮机构。由凸轮 1、从动件 3 和机架组 成。将凸轮 1 的匀速转动转变为从动件 3 的往复移动。 从动件 3 的运动特性可以根据实际需要设计,从而确 定凸轮 1 的轮廓。因此机构可以实现复杂的运动规律。 根据凸轮与从动件接触形式可以分成尖端从动件、平 底从动件、滚子从动件等形式。左图所示为滚子从动 件形式