移动从动件凸轮机构 两个移动副相邻,且其中一个移动副与机架相关联, Lsinφ 如左图所示。这种机构从动件3的位移与原动件转角 的正弦成正比,故称为正弦机构。 3 3 正弦机构 两个移动副不相邻,如左图所示。这种机构从动件3 的位移与原动件转角的正切成正比,故称为正切机构。 正切机构与正弦机构常用于计算机构中。 3 H 正切机构 构件1转动一圈,滑块6往复运动一次。在运动过程 中,当B角接近0°时机构具有很大的增力效果。 肘杆机构 该机构由曲柄1、连杆2、齿轮3、固定齿条4、移动 齿条5和机架组成。机构将曲柄1的转动转变为齿条 5的左右往复移动。机构具有行程放大作用。 6 7717777777777777 连杆-齿轮齿条组合机构 该机构由曲柄滑块机构和移动从动件移动凸轮机构组 合而成。机构将曲柄1的连续匀速转动转变为从动件 4的上下往复移动。 03 7177n 凸轮连杆组合机构 78
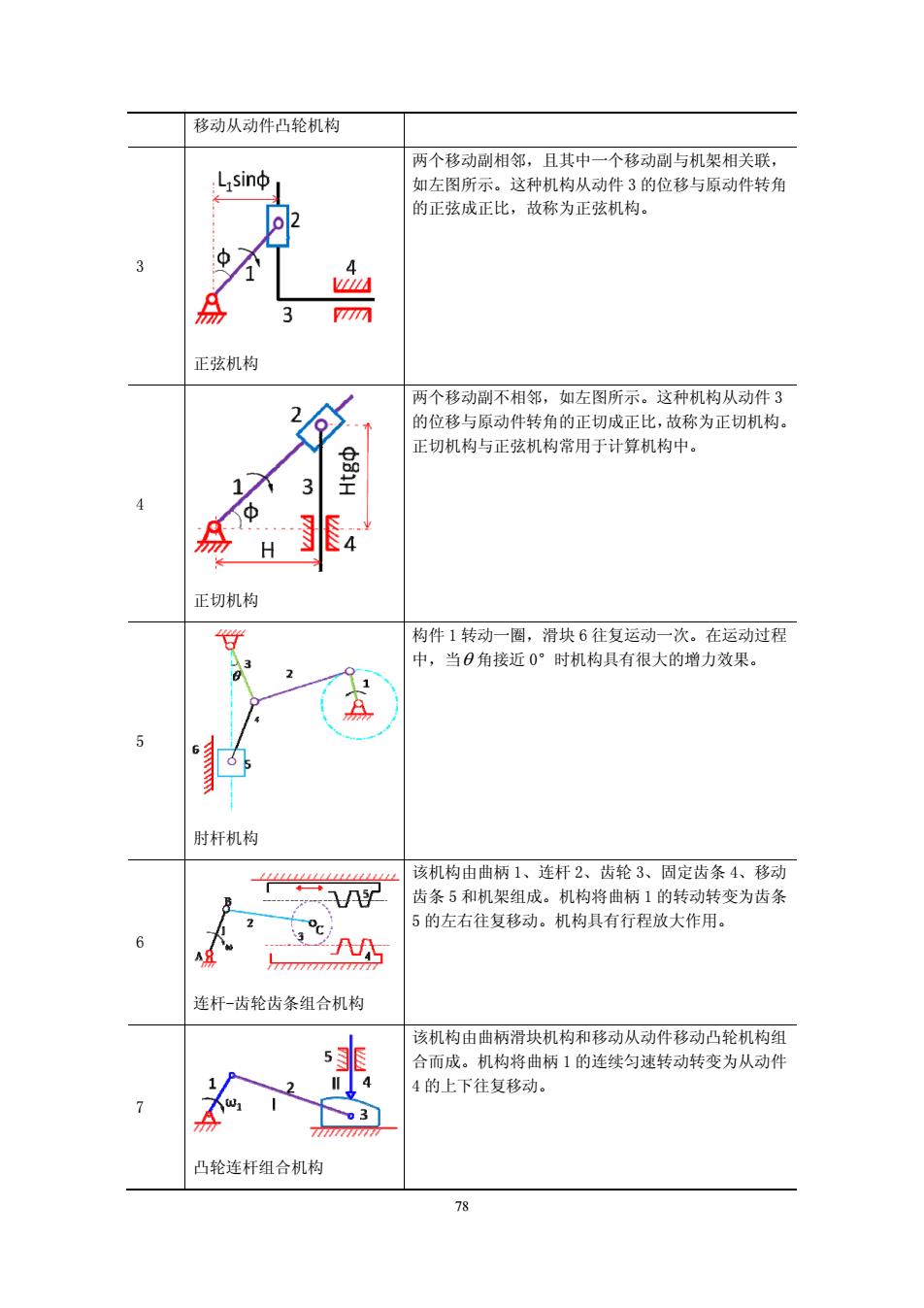
78 移动从动件凸轮机构 3 正弦机构 两个移动副相邻,且其中一个移动副与机架相关联, 如左图所示。这种机构从动件 3 的位移与原动件转角 的正弦成正比,故称为正弦机构。 4 正切机构 两个移动副不相邻,如左图所示。这种机构从动件 3 的位移与原动件转角的正切成正比,故称为正切机构。 正切机构与正弦机构常用于计算机构中。 5 肘杆机构 构件 1 转动一圈,滑块 6 往复运动一次。在运动过程 中,当θ 角接近 0°时机构具有很大的增力效果。 6 连杆-齿轮齿条组合机构 该机构由曲柄 1、连杆 2、齿轮 3、固定齿条 4、移动 齿条 5 和机架组成。机构将曲柄 1 的转动转变为齿条 5 的左右往复移动。机构具有行程放大作用。 7 凸轮连杆组合机构 该机构由曲柄滑块机构和移动从动件移动凸轮机构组 合而成。机构将曲柄 1 的连续匀速转动转变为从动件 4 的上下往复移动
该机构将曲柄2的转动转变为构件5的往复运动,具 A VILLA 有急回特性。在牛头刨床中广为应用。 ☑ 8 牛头刨机构 6.3.3连续转动变为单侧带停歇往复直线移动(见表6-5) 表6-5连续转动变为单侧带停歇往复直线移动求解目录 序号 机构示例 机构描述及主要特征参数 移动从动件凸轮机构。由凸轮1、从动件3和机架组 成。将凸轮1的匀速转动转变为从动件3的往复移动。 从动件3的运动特性可以根据实际需要设计,从而确 定凸轮1的轮廓。因此机构可以实现复杂的运动规律。 可以根据设计要求,从动件3最大行程或最小行程处 实现停歇,分别称为远休止和静休止。 移动从动件凸轮机构 在行星轮系1、2、3中,行星轮2节圆上C点铰接杆 4带动滑块5往复运动。当齿轮2、3的齿数比Z3/Z2=3 时,主动杆1转动,C点轨迹为三条近似圆弧的内摆 线LM、MN、NL。若4的杆长等于该近似圆弧的平均曲 率半径,D点位于曲率半径中线,则滑块5在右极限 位置近似停歇,停歇周期相当于一个周期运动的1/3。 利用轨迹实现带间歇运动机 该机构应用于要求停歇时间较大的场合。 构 79
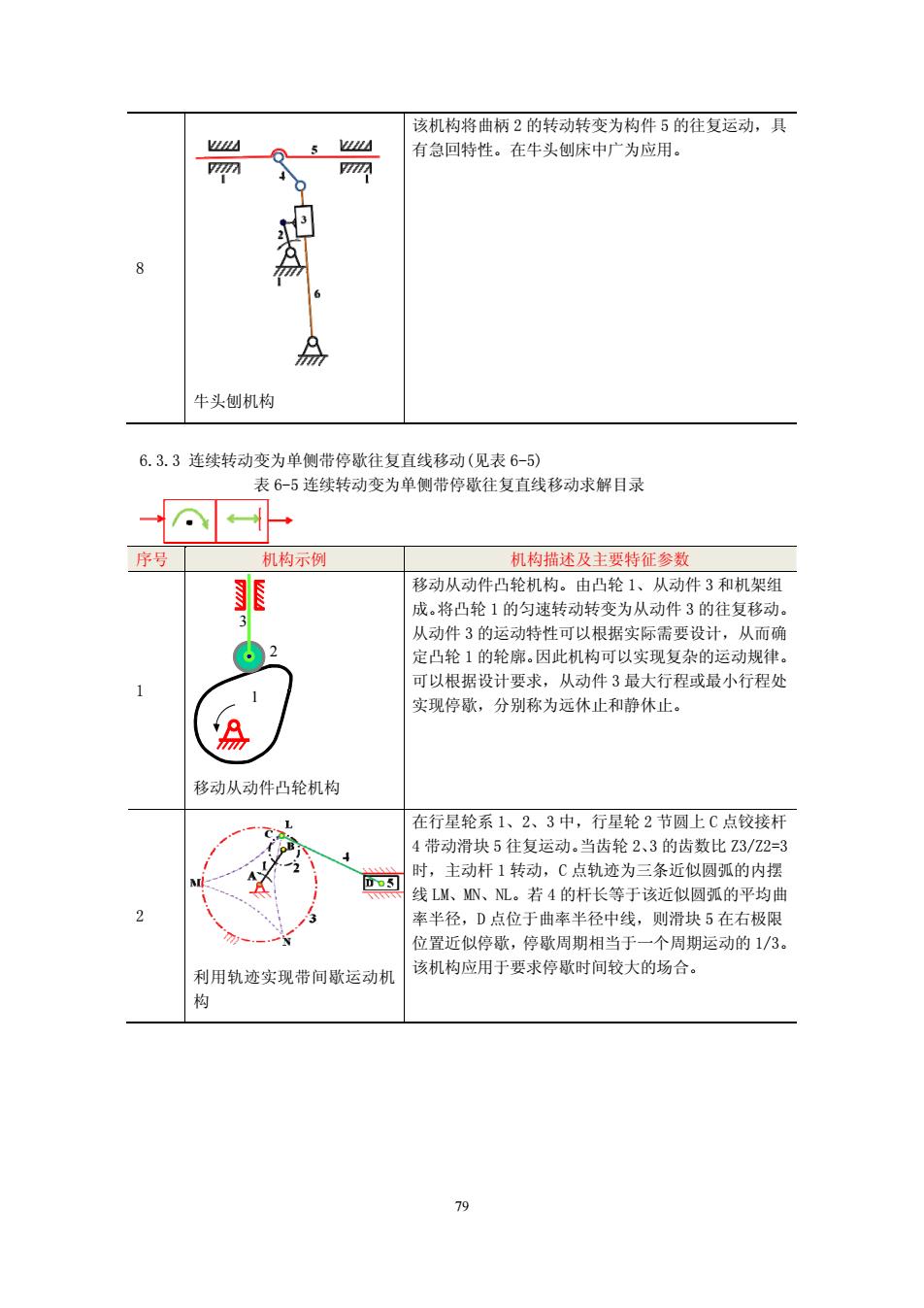
79 8 牛头刨机构 该机构将曲柄 2 的转动转变为构件 5 的往复运动,具 有急回特性。在牛头刨床中广为应用。 6.3.3 连续转动变为单侧带停歇往复直线移动(见表 6-5) 表 6-5 连续转动变为单侧带停歇往复直线移动求解目录 序号 机构示例 机构描述及主要特征参数 1 1 2 3 移动从动件凸轮机构 移动从动件凸轮机构。由凸轮 1、从动件 3 和机架组 成。将凸轮 1 的匀速转动转变为从动件 3 的往复移动。 从动件 3 的运动特性可以根据实际需要设计,从而确 定凸轮 1 的轮廓。因此机构可以实现复杂的运动规律。 可以根据设计要求,从动件 3 最大行程或最小行程处 实现停歇,分别称为远休止和静休止。 2 利用轨迹实现带间歇运动机 构 在行星轮系 1、2、3 中,行星轮 2 节圆上 C 点铰接杆 4 带动滑块 5 往复运动。当齿轮 2、3 的齿数比 Z3/Z2=3 时,主动杆 1 转动,C 点轨迹为三条近似圆弧的内摆 线 LM、MN、NL。若 4 的杆长等于该近似圆弧的平均曲 率半径,D 点位于曲率半径中线,则滑块 5 在右极限 位置近似停歇,停歇周期相当于一个周期运动的 1/3。 该机构应用于要求停歇时间较大的场合