
10.1.1工作于整流状态时 ■电流断续时电动机的机械特性 ◆由于整流电压是一个脉动的直流电压,当电动机的负载减小时, 平波电抗器中的电感储能减小,致使电流断续,此时电动机的机械特 性也就呈现出非线性。 ◆电流断续时机械特性的特点 E 分析60°时的情况,当L=0, b (W2U) 断续段特性的近似直线 忽略△U,此时的反电动势E为 E%=1.17U2cos60°=0.585U2,而实际 Eo 上,晶闸管导通时相电压瞬时值为 (0.585U2) V2U,大于E6,也即I不为零,所以 √2U,才是理想空载点。 dmin 0 r在电流断续情况下,a≤60时, 断续区 连续区 电动机的实际空载反电动势都是 √2U,;当C>60°以后,空载反电动势 将由V2U,cos(a-π/3)决定。 图10-3电流断续时电动势的特性曲线 6/70
6/70 10.1.1 工作于整流状态时 ■电流断续时电动机的机械特性 ◆由于整流电压是一个脉动的直流电压,当电动机的负载减小时, 平波电抗器中的电感储能减小,致使电流断续,此时电动机的机械特 性也就呈现出非线性。 ◆电流断续时机械特性的特点 ☞分析=60时的情况,当Id=0, 忽略 ,此时的反电动势 为 ,而实际 上,晶闸管导通时相电压瞬时值为 ,大于 ,也即Id不为零,所以 才是理想空载点。 U E0 0 2 585 2 E = 1.17U cos60 = 0. U 2 2U E0 2 2U o Id E E0 E' Idmin 0.585 U2 ( ) U2 ( 2 断续段特性的近似直线 断续区 连续区 0 ) 图10-3 电流断续时电动势的特性曲线 ☞在电流断续情况下, 时, 电动机的实际空载反电动势都是 ;当 以后,空载反电动势 将由 决定。 60 2U2 60 2 cos( 3) U2 −
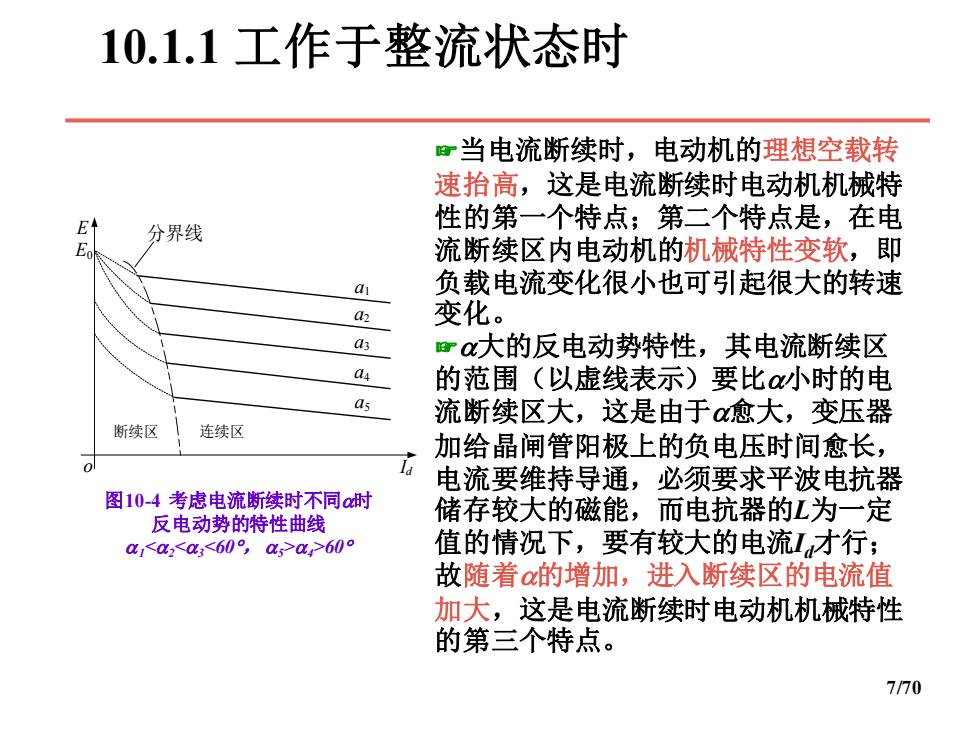
10.1.1工作于整流状态时 r当电流断续时,电动机的理想空载转 速抬高,这是电流断续时电动机机械特 E 性的第一个特点;第二个特点是,在电 分界线 E 流断续区内电动机的机械特性变软,即 a 负载电流变化很小也可引起很大的转速 a2 变化。 m大的反电动势特性,其电流断续区 aa 的范围(以虚线表示)要比小时的电 as 流断续区大,这是由于α愈大,变压器 断续区 连续区 加给晶闸管阳极上的负电压时间愈长, 电流要维持导通,必须要求平波电抗器 图10-4考虑电流断续时不同a时 储存较大的磁能,而电抗器的L为一定 反电动势的特性曲线 a1<a2<a3<60°,a>a>60° 值的情况下,要有较大的电流I才行; 故随着a的增加,进入断续区的电流值 加大,这是电流断续时电动机机械特性 的第三个特点。 770
7/70 10.1.1 工作于整流状态时 Id a1 a2 a3 a4 a5 E 分界线 E0 o 断续区 连续区 图10-4 考虑电流断续时不同时 反电动势的特性曲线 1<2<3<60,5>4>60 ☞当电流断续时,电动机的理想空载转 速抬高,这是电流断续时电动机机械特 性的第一个特点;第二个特点是,在电 流断续区内电动机的机械特性变软,即 负载电流变化很小也可引起很大的转速 变化。 ☞大的反电动势特性,其电流断续区 的范围(以虚线表示)要比小时的电 流断续区大,这是由于愈大,变压器 加给晶闸管阳极上的负电压时间愈长, 电流要维持导通,必须要求平波电抗器 储存较大的磁能,而电抗器的L为一定 值的情况下,要有较大的电流Id才行; 故随着的增加,进入断续区的电流值 加大,这是电流断续时电动机机械特性 的第三个特点
10.1.1工作于整流状态时 ◆电流断续时电动机机械特性可由下面三个式子准确地得出 in("+a+o-p)-sin(a-o)e-age Ey=2U,cosp 61 6 (10-6) 1-e-g0 Ex,0)sin n= (10-7) 1-e&g9 Id= 2 en后+a-cwg+a+02 C-0m] (10-8) 2πZcoso 式中,P=g兴2-E+2为回路总电感。 8/70
8/70 10.1.1 工作于整流状态时 ◆电流断续时电动机机械特性可由下面三个式子准确地得出 ctg ctg M e e E U − − − + + − − + − = 1 ) 6 ) sin( 6 sin( 2 cos 2 ctg ctg e e M e e C U C E n − − − + + − − + − = = 1 ) 6 ) sin( 6 sin( 2 cos 2 ] 2 ) 6 ) cos( 6 [cos( 2 cos 3 2 2 2 n U C Z U I e d = + − + + − 式中, , ,L为回路总电感。 R L tg −1 = 2 2 Z = R + L (10-6) (10-7) (10-8)
10.1.1工作于整流状态时 ◆一般只要主电路电感足够大,可以只考虑电流连续段,完全按线性处理, 当低速轻载时,断续作用显著,可改用另一段较陡的特性来近似处理。 m整流电路为三相半波时,在最小负载电流为lm时,为保证电流连续所 需的主回路电感量(单位为mH)为 U L=1.46 (10-9) dmin 即对于三相桥式全控整流电路带电动机负载的系统,有 L=0.693 U2 (10-10) dmin L中包括整流变压器的漏电感、电枢电感和平波电抗器的电感,前者数 值都较小,有时可忽略;Imm一般取电动机额定电流的5%~10%。 三相桥式全控整流电压的脉动频率比三相半波的高一倍,因而所需平波 电抗器的电感量也可相应减小约一半。 9/70
9/70 10.1.1 工作于整流状态时 ◆一般只要主电路电感足够大,可以只考虑电流连续段,完全按线性处理, 当低速轻载时,断续作用显著,可改用另一段较陡的特性来近似处理。 ☞整流电路为三相半波时,在最小负载电流为Idmin时,为保证电流连续所 需的主回路电感量(单位为mH)为 min 2 1.46 d I U L = ☞对于三相桥式全控整流电路带电动机负载的系统,有 min 2 0.693 d I U L = L中包括整流变压器的漏电感、电枢电感和平波电抗器的电感,前者数 值都较小,有时可忽略;Idmin一般取电动机额定电流的5%~10%。 ☞三相桥式全控整流电压的脉动频率比三相半波的高一倍,因而所需平波 电抗器的电感量也可相应减小约一半。 (10-9) (10-10)
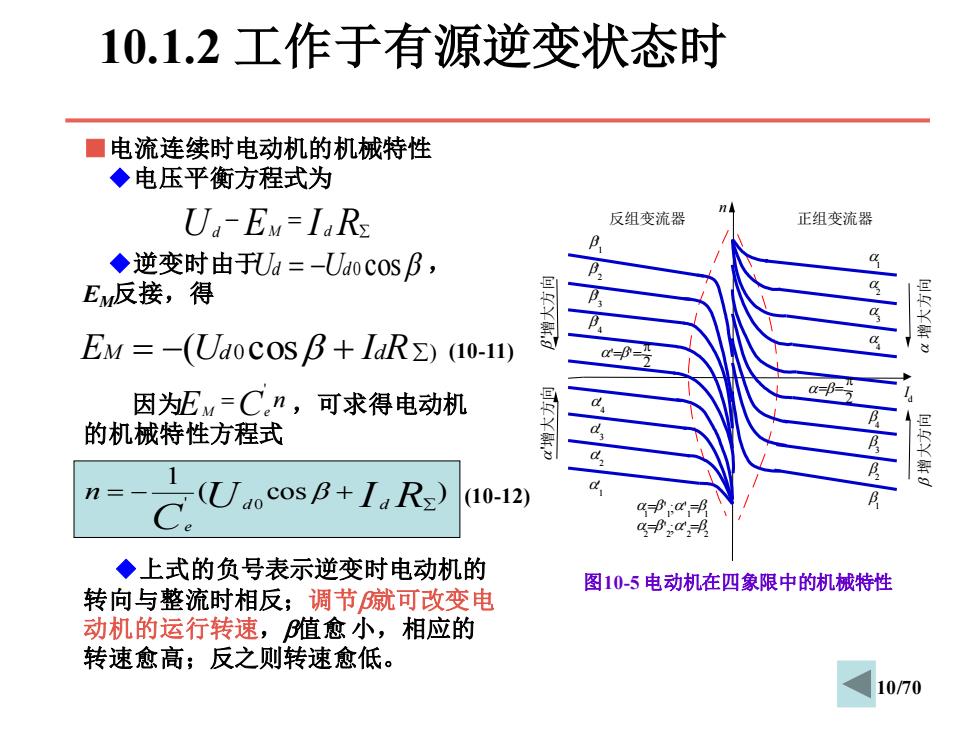
10.1.2工作于有源逆变状态时 电流连续时电动机的机械特性 ◆电压平衡方程式为 Ua-Ev=IaR n 反组变流器 正组变流器 ◆逆变时由孔Uh=-Uao cos B, B. EM反接,得 EM=-(Uaocos B+laRz)(10-11) Q a-B= 因为By=Cn,可求得电动机 d 的机械特性方程式 d n= 六(Udocos B+IaRs) (10-12) aB a ◆上式的负号表示逆变时电动机的 图10-5电动机在四象限中的机械特性 转向与整流时相反;调节就可改变电 动机的运行转速,B值愈小,相应的 转速愈高;反之则转速愈低。 10/70
10/70 因为 ,可求得电动机 的机械特性方程式 10.1.2 工作于有源逆变状态时 Ud EM I dR − = E C n M e ' = ■电流连续时电动机的机械特性 ◆电压平衡方程式为 ◆逆变时由于 , EM反接,得 Ud = −Ud 0 cos EM = −(Ud 0 cos + IdR ) ( cos ) 1 ' U 0 I R C d d e n = − + 反组变流器 正组变流器 n 3 2 1 I d 4 2 3 4 1 = = 2 '= '= 2 ' 3 ' 2 ' 1 ' 4 ' 2 ' 3 ' 4 ' 1 1 = ' 1 ; ' 1 = 1 2 = ' 2 ; ' 2 = 2 '增大方向 '增大方向 增大方向 增大方向 ◆上式的负号表示逆变时电动机的 图10-5 电动机在四象限中的机械特性 转向与整流时相反;调节就可改变电 动机的运行转速,值愈小,相应的 转速愈高;反之则转速愈低。 (10-11) (10-12)