上大 Linear DC Motor i=ViR (Ohm's Law) ⑧B B is constant Vin eind E ⑧ When the switch is on,the wire will experience a sudden increase of force from 0 to F produce positive acceleration. Av will increase e will be induced in the direction opposite to i. i will decrease. Fwill decrease Eventually v reaches to a a will decrease to 0. constant velocity. 21 圈上活大 Linear DC Motor under External Load At steady-state,apply Fad to slow down the wire. The net force(F-Foad)will decrease,a<o. v will decrease. ed will decrease. i will increase. R Fwill increase. B a will increase to 0. Ev ⑧ Again,v eventually reaches a constant velocity.Vew<v 22
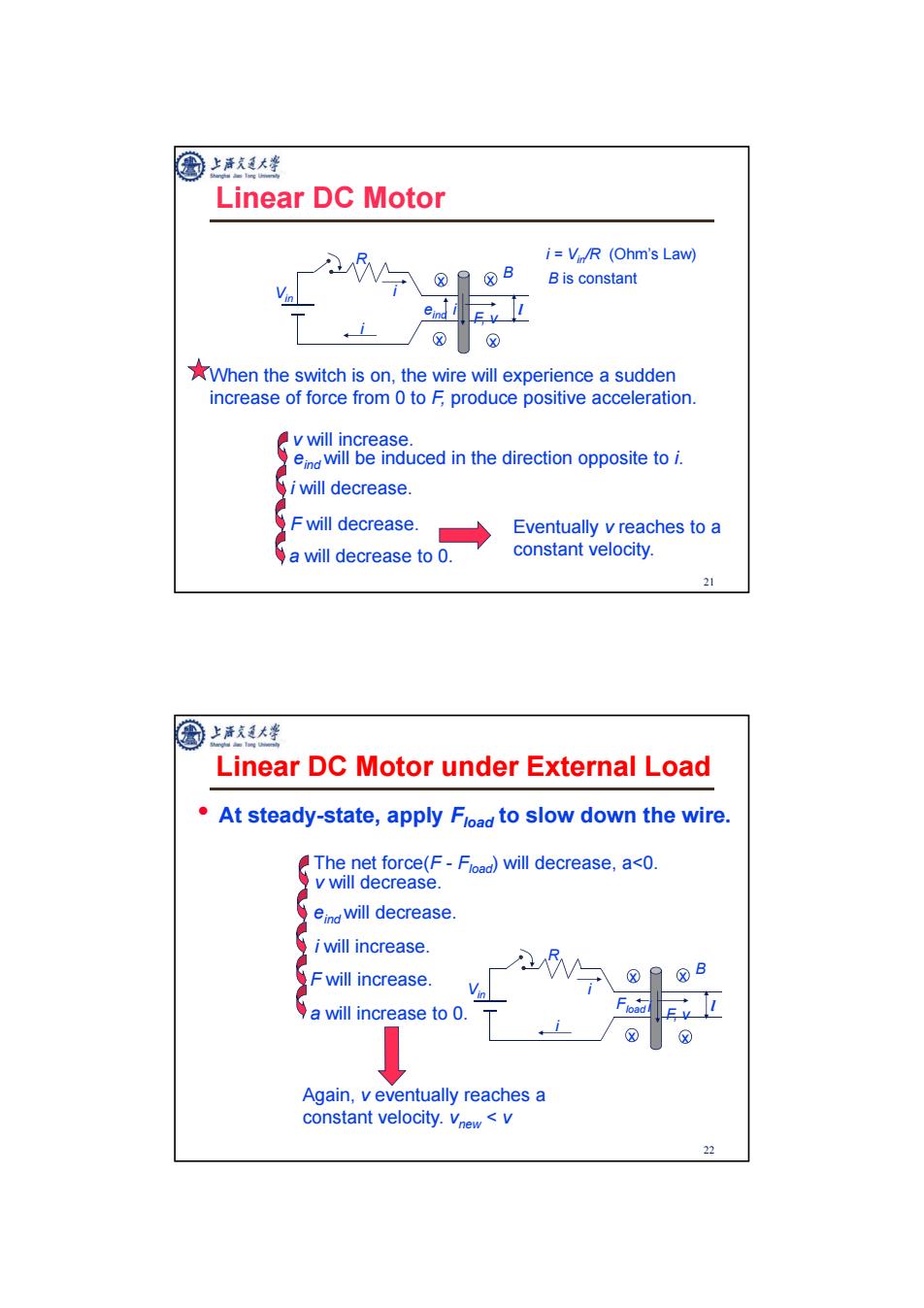
21 Linear DC Motor R Vin i i e i ind l F, v x x x x B i = Vin/R (Ohm’s Law) B is constant When the switch is on, the wire will experience a sudden increase of force from 0 to F, produce positive acceleration. v will increase. eind will be induced in the direction opposite to i. i will decrease. F will decrease. a will decrease to 0. Eventually v reaches to a constant velocity. 22 Linear DC Motor under External Load • At steady-state, apply Fload to slow down the wire. The net force(F - Fload) will decrease, a<0. v will decrease. i will increase. a will increase to 0. F will increase. eind will decrease. Again, v eventually reaches a constant velocity. vnew < v R Vin l F, v x x x x B Fload i i i
eftity vs.Force Relationship-DC Linear Motor Basic Trend::Fload→v;Fload→vT Note:v is the steady-state velocity. 23 圈活大连 PM DC Motor:Theory of Operation Basic Equations: Motor Output Torque: 0 T:motor output torque K:torque constant(motor specific,based on the construction) iA:armature current [Amp] To:torque loss(e.g.frictional) 24
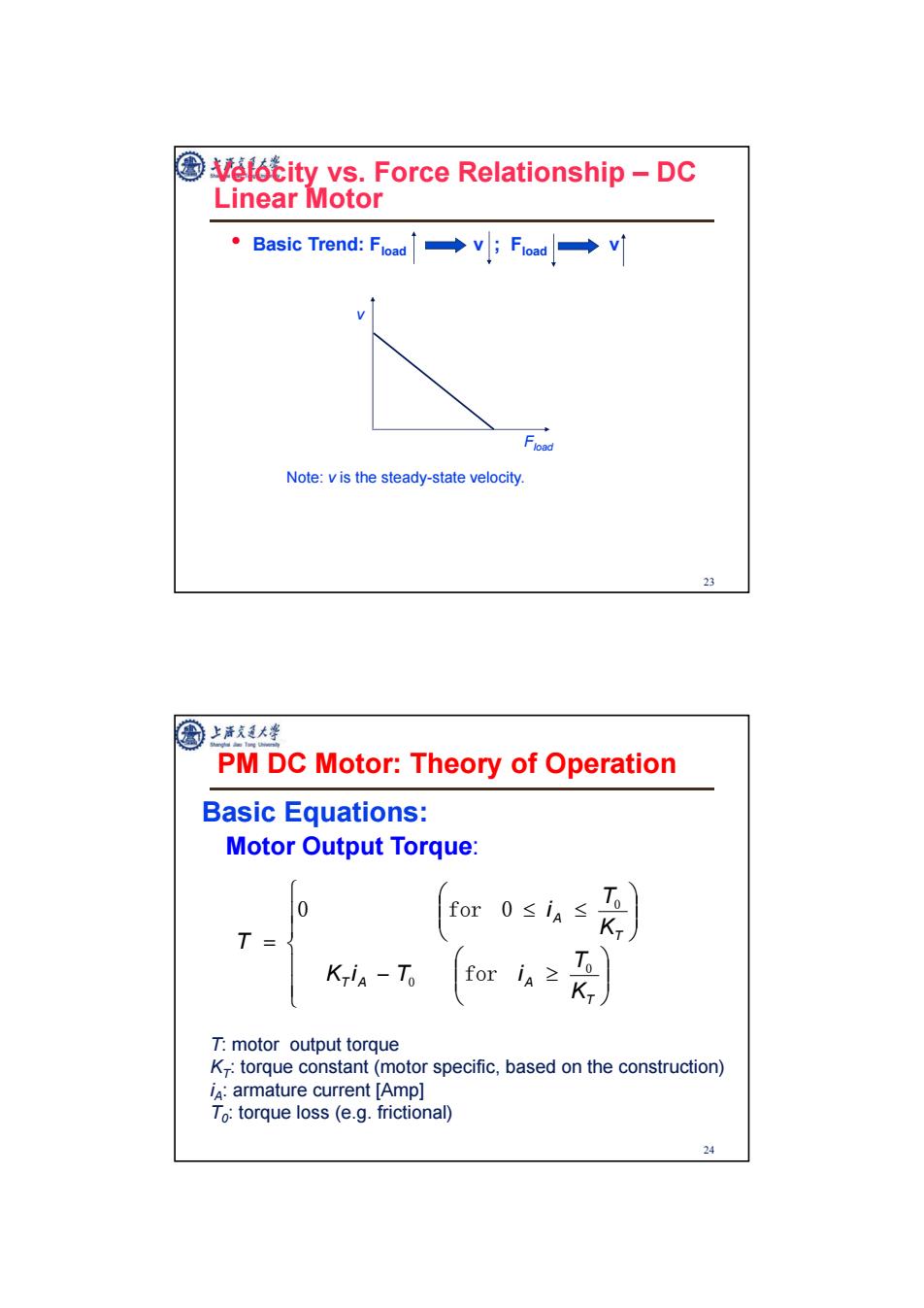
23 Velocity vs. Force Relationship – DC Linear Motor v Fload • Basic Trend: Fload v ; Fload v Note: v is the steady-state velocity. 24 PM DC Motor: Theory of Operation Motor Output Torque: T T A A T A K T K i T i K T i T 0 0 0 for 0 for 0 T: motor output torque KT: torque constant (motor specific, based on the construction) i A: armature current [Amp] T0: torque loss (e.g. frictional) Basic Equations:

上泽克廷大学 PM DC Motor:Theory of Operation Current Line: T+ T KT Slope=1/KT To/Kr T 25 上清克通大学 PM DC Motor:Theory of Operation Electromotive Force(EMF): eind KEn eind:induced voltage or EMF K=:EMF constant(motor specific,based on construction) n:rotational speed of the motor [rpm]
25 T T A K T T K i 1 0 Current Line: i T T0/KT Slope = 1/KT PM DC Motor: Theory of Operation 26 PM DC Motor: Theory of Operation Electromotive Force (EMF): eind KEn eind: induced voltage or EMF KE: EMF constant (motor specific, based on construction) n: rotational speed of the motor [rpm]