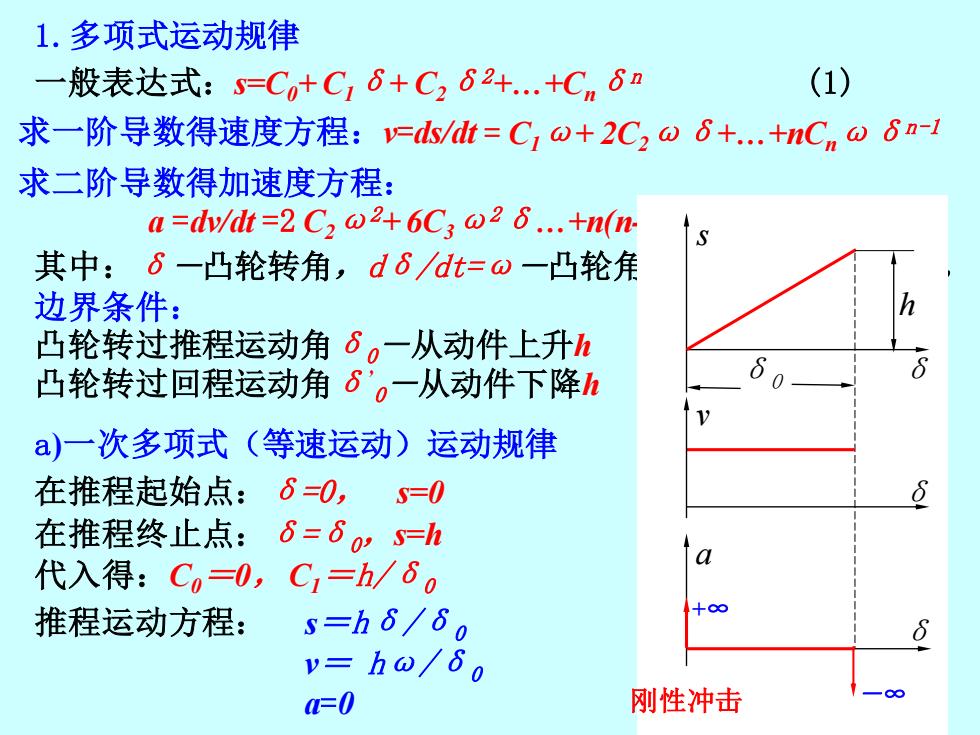
边界条件: 凸轮转过推程运动角δ0-从动件上升h 凸轮转过回程运动角δ’ 0-从动件下降h 1.多项式运动规律 一般表达式:s=C0+ C1δ+ C2δ2 +.+Cn δn (1) 求一阶导数得速度方程:v=ds/dt 求二阶导数得加速度方程: a =dv/dt =2 C2ω2 + 6C3ω2δ.+n(n-1)Cn ω2δn-2 其中:δ-凸轮转角,dδ/dt=ω-凸轮角速度, Ci-待定系数。 a)一次多项式(等速运动)运动规律 在推程起始点:δ=0, s=0 代入得:C0=0,C1=h/δ0 推程运动方程: s=hδ/δ0 v= hω/δ0 a=0 s δ0 δ v δ a δ h 在推程终止点:δ=δ0,s=h +∞ 刚性冲击 -∞ = C1ω+ 2C2ωδ+.+nCn ωδn-1
边界条件: 凸轮转过推程运动角δ0-从动件上升h 凸轮转过回程运动角δ’ 0-从动件下降h 1.多项式运动规律 一般表达式:s=C0+ C1δ+ C2δ2 +.+Cn δn (1) 求一阶导数得速度方程:v=ds/dt 求二阶导数得加速度方程: a =dv/dt =2 C2ω2 + 6C3ω2δ.+n(n-1)Cn ω2δn-2 其中:δ-凸轮转角,dδ/dt=ω-凸轮角速度, Ci-待定系数。 a)一次多项式(等速运动)运动规律 在推程起始点:δ=0, s=0 代入得:C0=0,C1=h/δ0 推程运动方程: s=hδ/δ0 v= hω/δ0 a=0 s δ0 δ v δ a δ h 在推程终止点:δ=δ0,s=h +∞ 刚性冲击 -∞ = C1ω+ 2C2ωδ+.+nCn ωδn-1

同理得回程运动方程: s=h(1-δ/δ’ 0 ) b)二次多项式(等加等减速)运动规律 位移曲线为一抛物线。加、减速各占一半。 推程加速上升段边界条件: 起始点:δ=0, s=0, v=0 中间点:δ=δ0/2,s=h/2 求得:C0=0,C1=0,C2=2h/δ0 2 加速段推程运动方程为: s =2hδ2 /δ0 2 推程减速上升段边界条件: 终止点:δ=δ0, s=h, v=0 中间点:δ=δ0/2,s=h/2 求得:C0=-h,C1=4h/δ0,C2=-2h/δ0 2 减速段推程运动方程为:s =h-2h(δ-δ0) 2 /δ0 2 1 δ s δ v δ a v =4hωδ/δ0 2 a =4hω2 /δ0 2 v =-4hω(δ-δ0)/δ0 2 a =-4hω2 /δ0 2 2 3 4 5 6 h/2 δ0 h/2 2hω/δ0 柔性冲击 4hω2 /δ0 2 50分 v=-hω/δ’ 0 a=0 3
同理得回程运动方程: s=h(1-δ/δ’ 0 ) b)二次多项式(等加等减速)运动规律 位移曲线为一抛物线。加、减速各占一半。 推程加速上升段边界条件: 起始点:δ=0, s=0, v=0 中间点:δ=δ0/2,s=h/2 求得:C0=0,C1=0,C2=2h/δ0 2 加速段推程运动方程为: s =2hδ2 /δ0 2 推程减速上升段边界条件: 终止点:δ=δ0, s=h, v=0 中间点:δ=δ0/2,s=h/2 求得:C0=-h,C1=4h/δ0,C2=-2h/δ0 2 减速段推程运动方程为:s =h-2h(δ-δ0) 2 /δ0 2 1 δ s δ v δ a v =4hωδ/δ0 2 a =4hω2 /δ0 2 v =-4hω(δ-δ0)/δ0 2 a =-4hω2 /δ0 2 2 3 4 5 6 h/2 δ0 h/2 2hω/δ0 柔性冲击 4hω2 /δ0 2 50分 v=-hω/δ’ 0 a=0 3
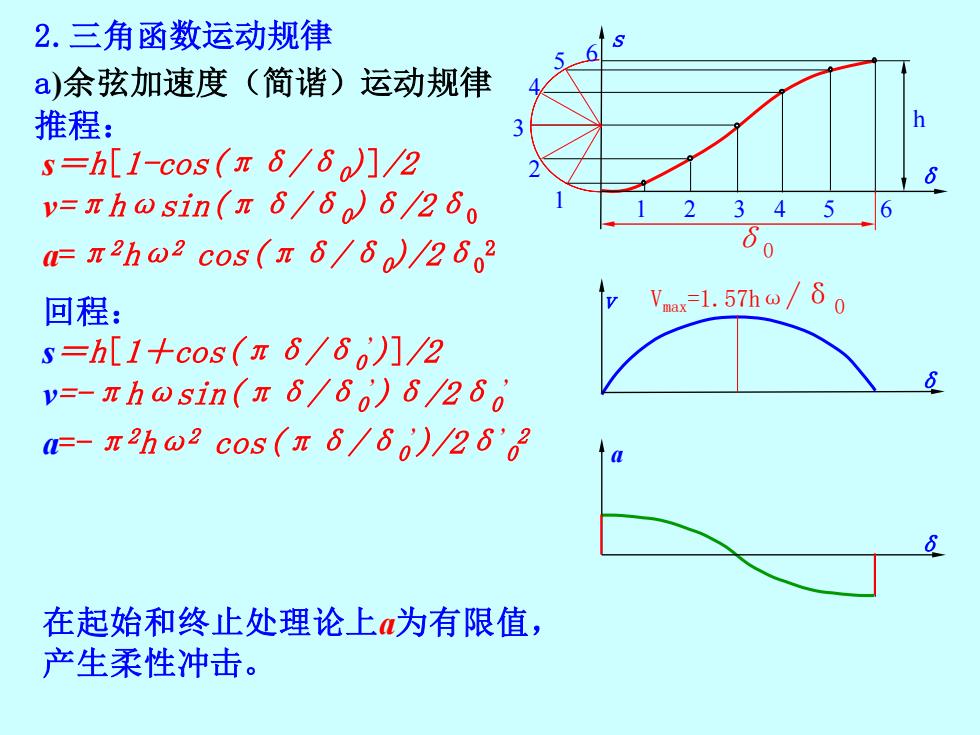
2.三角函数运动规律 a)余弦加速度(简谐)运动规律 推程: s=h[1-cos(πδ/δ0)]/2 v=πhωsin(πδ/δ0)δ/2δ0 a=π2 hω2 cos(πδ/δ0)/2δ0 2 回程: s=h[1+cos(πδ/δ0 ’)]/2 v=-πhωsin(πδ/δ0 ’)δ/2δ0 ’ a=-π2 hω2 cos(πδ/δ0 ’)/2δ’ 0 2 1 2 3 4 5 6 δ a δ v δ s h δ0 1 2 3 4 5 6 Vmax=1.57hω/δ0 在起始和终止处理论上a为有限值, 产生柔性冲击
2.三角函数运动规律 a)余弦加速度(简谐)运动规律 推程: s=h[1-cos(πδ/δ0)]/2 v=πhωsin(πδ/δ0)δ/2δ0 a=π2 hω2 cos(πδ/δ0)/2δ0 2 回程: s=h[1+cos(πδ/δ0 ’)]/2 v=-πhωsin(πδ/δ0 ’)δ/2δ0 ’ a=-π2 hω2 cos(πδ/δ0 ’)/2δ’ 0 2 1 2 3 4 5 6 δ a δ v δ s h δ0 1 2 3 4 5 6 Vmax=1.57hω/δ0 在起始和终止处理论上a为有限值, 产生柔性冲击
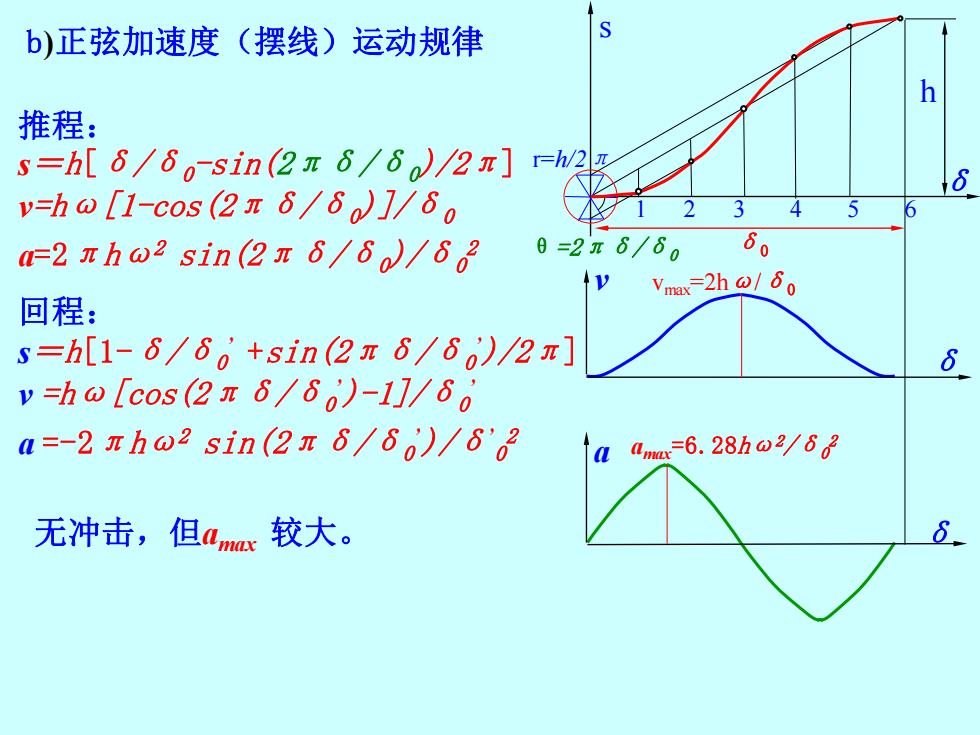
s δ b)正弦加速度(摆线)运动规律 推程: s=h[δ/δ0-sin(2πδ/δ0)/2π] v=hω[1-cos(2πδ/δ0)]/δ0 a=2πhω2 sin(2πδ/δ0)/δ0 2 回程: s=h[1-δ/δ0 ’ +sin(2πδ/δ0 ’)/2π] v =hω[cos(2πδ/δ0 ’)-1]/δ0 ’ a =-2πhω2 sin(2πδ/δ0 ’)/δ’ 0 2 1 2 3 4 5 6 v δ δ a h δ0 r=h/2π vmax=2hω/δ0 amax =6.28hω2 /δ0 2 无冲击,但amax 较大。 θ=2πδ/δ0
s δ b)正弦加速度(摆线)运动规律 推程: s=h[δ/δ0-sin(2πδ/δ0)/2π] v=hω[1-cos(2πδ/δ0)]/δ0 a=2πhω2 sin(2πδ/δ0)/δ0 2 回程: s=h[1-δ/δ0 ’ +sin(2πδ/δ0 ’)/2π] v =hω[cos(2πδ/δ0 ’)-1]/δ0 ’ a =-2πhω2 sin(2πδ/δ0 ’)/δ’ 0 2 1 2 3 4 5 6 v δ δ a h δ0 r=h/2π vmax=2hω/δ0 amax =6.28hω2 /δ0 2 无冲击,但amax 较大。 θ=2πδ/δ0
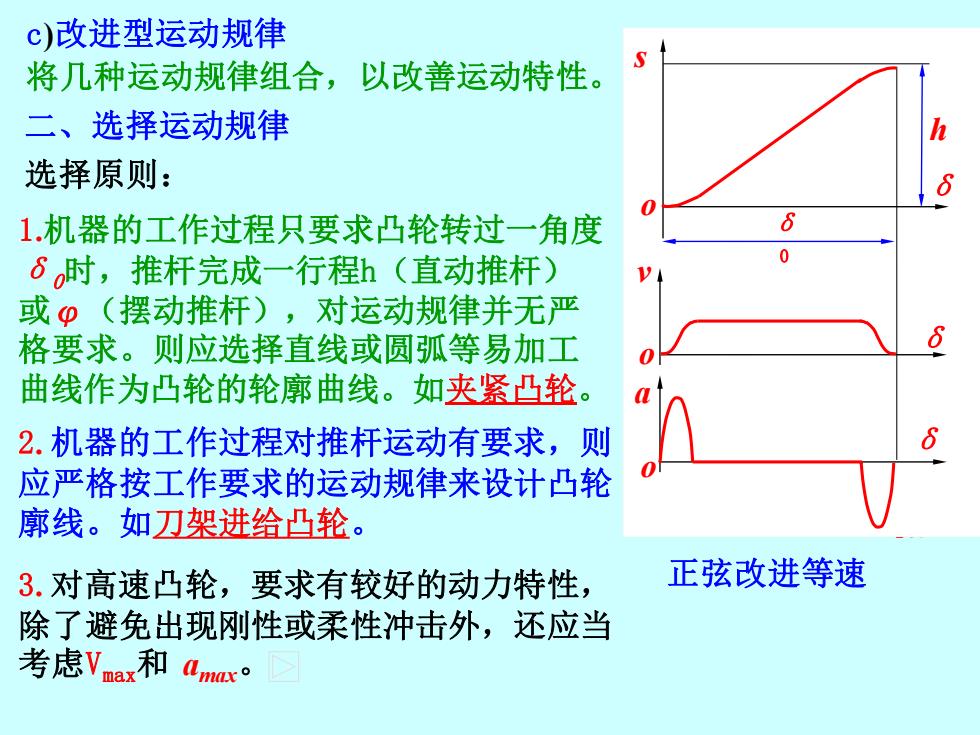
δ δ δ h v s a o o o δ 0 +∞ -∞ v s a δ δ δ h o o o δ 0 c)改进型运动规律 将几种运动规律组合,以改善运动特性。 正弦改进等速 二、选择运动规律 选择原则: 1.机器的工作过程只要求凸轮转过一角度 δ0时,推杆完成一行程h(直动推杆) 或φ(摆动推杆),对运动规律并无严 格要求。则应选择直线或圆弧等易加工 曲线作为凸轮的轮廓曲线。如夹紧凸轮。 2. 机器的工作过程对推杆运动有要求,则 应严格按工作要求的运动规律来设计凸轮 廓线。如刀架进给凸轮。 3. 对高速凸轮,要求有较好的动力特性, 除了避免出现刚性或柔性冲击外,还应当 考虑Vmax和 amax
δ δ δ h v s a o o o δ 0 +∞ -∞ v s a δ δ δ h o o o δ 0 c)改进型运动规律 将几种运动规律组合,以改善运动特性。 正弦改进等速 二、选择运动规律 选择原则: 1.机器的工作过程只要求凸轮转过一角度 δ0时,推杆完成一行程h(直动推杆) 或φ(摆动推杆),对运动规律并无严 格要求。则应选择直线或圆弧等易加工 曲线作为凸轮的轮廓曲线。如夹紧凸轮。 2. 机器的工作过程对推杆运动有要求,则 应严格按工作要求的运动规律来设计凸轮 廓线。如刀架进给凸轮。 3. 对高速凸轮,要求有较好的动力特性, 除了避免出现刚性或柔性冲击外,还应当 考虑Vmax和 amax