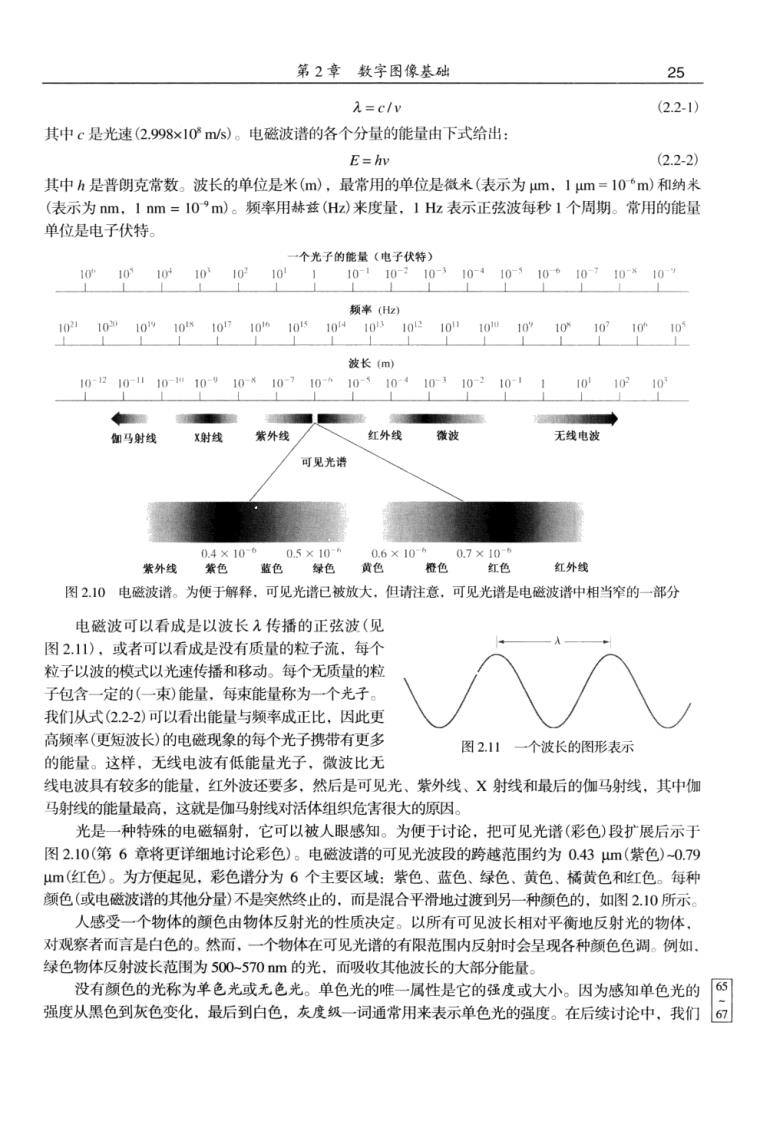
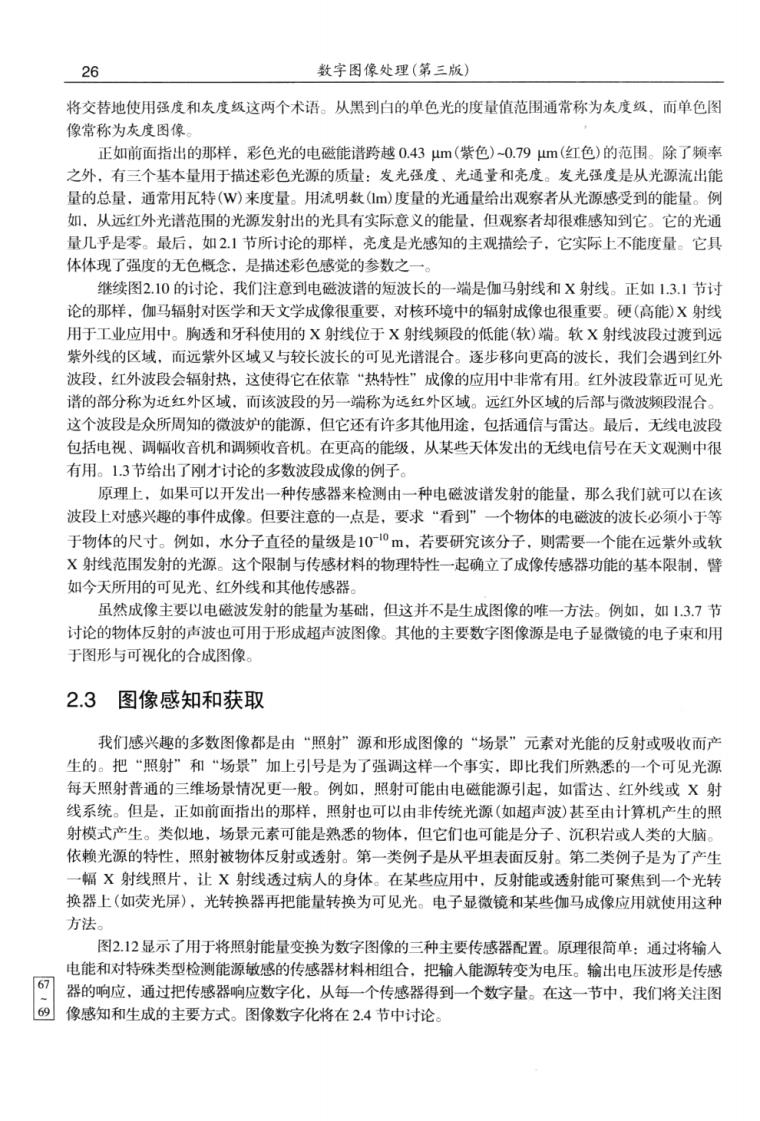
第2章数字图像基础 25 入=cw (22-1) 其中c是光速(2.998×10ms)。电磁波谱的各个分量的能量由下式给出 E=hv (02.2】 其中h是普朗克常数。波长的单位是米(m),最常用的单位是微米(表示为m,1um=10·m)和纳米 (表示为m.1m=109m)。须案用赫滋(Hz)来度量,1Hz表示正弦波每秒1个周期。常用的能量 单位是电子伏特 个光子的能量(电子伏特) 1101g1010210 10110-210-310-410-10◆1010*10 颜率( 装长m) 10210010101010010410310210110110 马射线 X射线 紫外线 红外线微被 无线电波 可见光语 )×106 05×10 6×10 0.7×10 紫外线紫色蓝色绿色黄 色 红色 红外线 图2.0电磁波谱。为便于解样,可见光谱已被放大,但请注意,可见光谱是电磁波谱中相当窄的一部分 电磁波可以看成是以波长入传播的正弦波(见 图2.1),或者可以看成是没有质量的粒子流,每个 粒子以波的模式以光速传播和移动。每个无质量的粒 子包含一定的(一束)能量。每束能量称为一个光子。 我们从式(2.2-2)可以看出能量与频率成正比,因此生 高频率(更短波长)的电磁现象的每个光子携带有更多 图211一个波长的图形表示 的能量。这样,无线电波有低能量光子,微波比无 线电波具有较多的能量,红外波还要多,然后是可见光、紫外线、X射线和最后的伽马射线,其中伽 马射线的能量最高,这就是伽马射线对活体组织危害很大的原因。 光是一种特殊的电磁辐射,它可以被人眼感知。为便于讨论,把可见光谱(彩色)段扩展后示于 图2.10(第6章将更详细地讨论彩色)。电磁波谱的可见光波段的跨越范围约为0.43m(紫色)0.79 m(红色)。为方便起见,彩色谱分为6个主要区域:紫色、蓝色、绿色、黄色、橘黄色和红色。每种 颜色(或电磁波谱的其他分量)不是突然终止的,而是混合平滑地过渡到另一种颜色的,如图2.10所示。 人感受一个物体的颜色由物体反射光的性质决定。以所有可见波长相对平衡地反射光的物体, 对观察者而言是白色的。然而,一个物体在可见光谱的有限范围内反射时会呈现各种颜色色调。例如 绿色物体反射波长范围为500-570m的光.而吸收其他波长的大部分能量。 没有颜色的光称为单色光或无色光。单色光的唯一属性是它的强度或大小。因为感知单色光的6丽 强度从黑色到灰色变化。最后到白色,灰度级一词通常用来表示单色光的强度。在后续讨论中,我们6回
26 数字图像处理(第三版) 将交替地使用强度和灰度级这两个术语。从黑到白的单色光的度量值范围通常称为灰度级,而单色图 常称为灰度图像 正如前而指出的那样,彩色光的电蓝能普跨越0.43um(紫色)0.9um(红色)的范由。除了顿率 之外,有三个基本量用于描述彩色光源的质量:发光强度、光通量和亮度。发光强度是从光源流出能 量的,总量通常用瓦特()来度量。用流明数m)度量的光通量给出观察者从光源感受到的能量。例 如,从远红外光谱范围的光源发射出的光具有实际意义的能量,但观察者却很难感知到它。它的光通 量几乎是零。最后,如21节所讨论的那样,亮度是光感知的主观描绘子,它实际上不能度量。它具 体体现了强度的无色概念,是描述彩色感觉的参数之 继续图2.10的讨论.我们注意到电磁波谱的短波长的一端是伽马射线和X射线。正如13.1节讨 论的那样,伽马辐射对医学和天文学成像很重要,对核环境中的辐射成像也很重要。硬(高能)X射线 用于工业应用中。胸透和牙科使用的X时线位于X附线颜段的低能(软)瑞。软X射线波段过度到远 紫外线的风域。而元紫外区域又与较长波长的口可见光谱混合。浮步移向事高的波长,我们会偶红外 波段。红外波段会辐射热,这使得它在依靠“热特性”成像的应用中非常有用。红外波段靠近可见光 谱的部分称为近红外区域,而该波段的另一端称为远红外区域。远红外区域的后部与微波频段混合 这个波段是众所周知的微波炉的能源,但它还有许多其他用途,包括通信与雷达。最后,无线电波 包括电视、调幅收音机和调颜收音机。在更高的能级,从某些天体发出的无线电信号在天文观测中很 有用。13节给出了刚木寸论的多数波段成像的例子 原理上,如果可以开发出一种传感器来检测由一种电磁波谱发射的能量。那么我们就可以在该 波段上对感兴趣的事件成像。但要注意的一点是,要求“看到”一个物体的电磁波的波长必须小于等 于物体的尺寸。例如,水分子直径的量级是100m,若要研究该分子,则需要一个能在远紫外或软 X射线范围发射的光源。这个限制与传感材料的物理特性一起确立了成像传感器功能的基本限制,譬 如今天所用的可见光、红外线和其他传感器。 虽然成像主要以电磁波发射的能量为基础,但这并不是生成图像的唯一方法。例如.如1.3.7节 讨论的物体反射的声波也可用于形成超声波图像。其他的主要数字图像源是电子显微镜的电子束和用 于图形与可视化的合成图像 2.3图像感知和获取 我们感兴趣的多数图像都是由“照射”源和形成图像的“场景”元素对光能的反射或吸收而产 生的。把“照射”和“场景”加上引号是为了强调这样一个事实,即比我们所熟悉的一个可见光源 每天照射普通的三维场景情况更一般。例如,照射可能由电磁能源引起,如雷达、红外线或X身 线系统。但是,正如前面指出的那样,照射也可以由非传统光源(如超声波)甚至由计算机产生的照 射模式产生。类似地,场景元素可能是熟悉的物体,但它们也可能是分子、沉积岩或人类的大脑 依赖光源的特性,照射被物体反射或透射。第一类例子是从平坦表面反射。第二类例子是为了产生 一幅X射线照片,让X射线透过病人的身体。在某些应用中,反射能或透射能可聚焦到一个光转 换器上(如荧光屏),光转换器再把能量转换为可见光。电子显微镜和某些伽马成像应用就使用这种 方法 图2.12显示了用于将照射能量变换为数字图像的三种主要传感器配置。原理很简单:通过将输人 电能和对特殊类型检测能源敏感的传感器材料相组合,把输入能源转变为电压。输出电压波形是传感 回器的响应,通过把传感器响应数字化。从每一个传感器得到一个数字量。在这一节中,我们将关注图 6的像感知和生成的主要方式。图像数字化将在2.4节中讨论
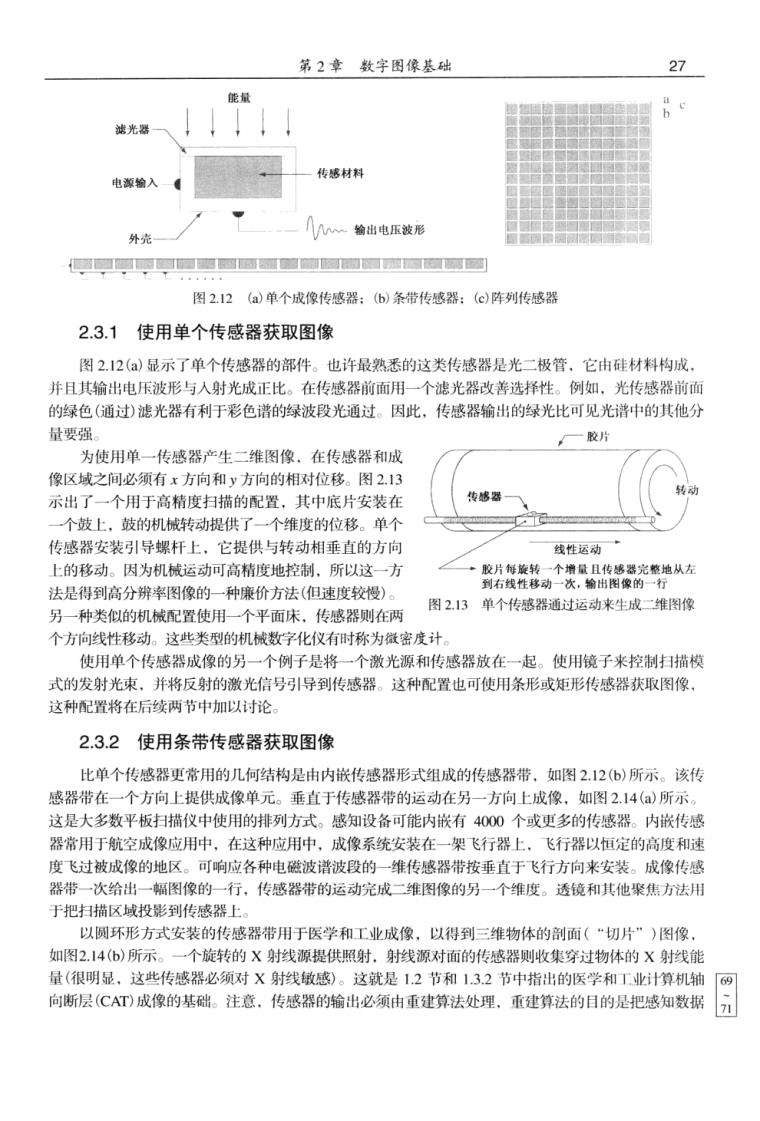
第2章数字困像基础 21 能量 球光器 电源输入一 一传感材有 外 一输出电压被形 ,,,回■回回圆 图2.12(a)单个成像传感器:(6)条带传感器:()阵列传感器 2.3.1使用单个传感器获取图像 图2.12()显示了单个传感器的部件。也许最熟悉的这类传感器是光二极管,它由硅材料构成 并且其输出电压波形与入射光成正比。在传感器前面用一个滤光器改善选择性。例如,光传感器前面 的绿色(G通过)滤光器有利于彩色谱的绿波段光通过。因此,传感器输出的绿光比可见光谱中的其他分 量要强 一胶片 为使用单一传成架产生一维图像。在传成器和成 像区域之间必须有x方向和y方向的相对位移。图2.1 示出了一个用于高精度扫描的配置,其中底片安装在 传感 一个鼓上,鼓的机械转动提供了一个维度的位移。单个 传感器安装引导螺杆上,它提供与转动相垂直的方向 线性运动 上的移动。因为机械运动可高精度地控制,所以这一方 法是得到高分辨率图像的一种廉价方法(但速度较慢) 图2.13单个传感器通过运动来生成二维图像 另一一种类似以的机械配置使用一一个平面床,传感界则在两 个方向线性移动。这些类型的机械数字化仪有时称为微密度计 使用单个传感器成像的另一个例子是将一个激光源和传感器放在一起。使用镜子来控制扫描模 式的发射光束,并将反射的激光信号引导到传感器。这种配置也可使用条形或矩形传感器获取图像, 这种配置将在后续两节中加以讨论 2.3.2使用条带传感器获取图像 比单个传感器更常用的几何结构是由内嵌传感器形式组成的传感器带,如图2.126)所示。该传 感器带在一个方向上提供成像单元。垂直于传感器带的运动在另一方向上成像.如图2.14(a)所示。 这是大多数平板扫描仪中使用的排列方式。感知设备可能内嵌有40O0个或更多的传感器。内嵌传感 器常用于航空成像应用中,在这种应用中,成像系统安装在一架飞行器上,飞行器以恒定的高度和速 度飞过被成像的地区。可响应各种电磁波业被段的一维传成器带按垂直干飞行方向来安装。成像传 器带一次给出一幅图像的一行,传感器带的运动完成二维图像的另一个维度。透镜和其他聚焦方法 于把扫描区域投影到传感器上。 以圆环形方式安装的传感器带用于医学和工业成像,以得到三维物体的剖面(“切片”)图像 如图2.14(6)所示。 一个旋转的X射线源提供照射,射线源对面的传感器则收集穿过物体的X射线能 量(很明显,这些传感器必须对X射线敏感)。这就是12节和13.2节中指出的医学和工业计算机轴网 向断层(CT)成像的基础。注意.传感器的输出必须由重建算法处理,重建算法的日的是把感知数据
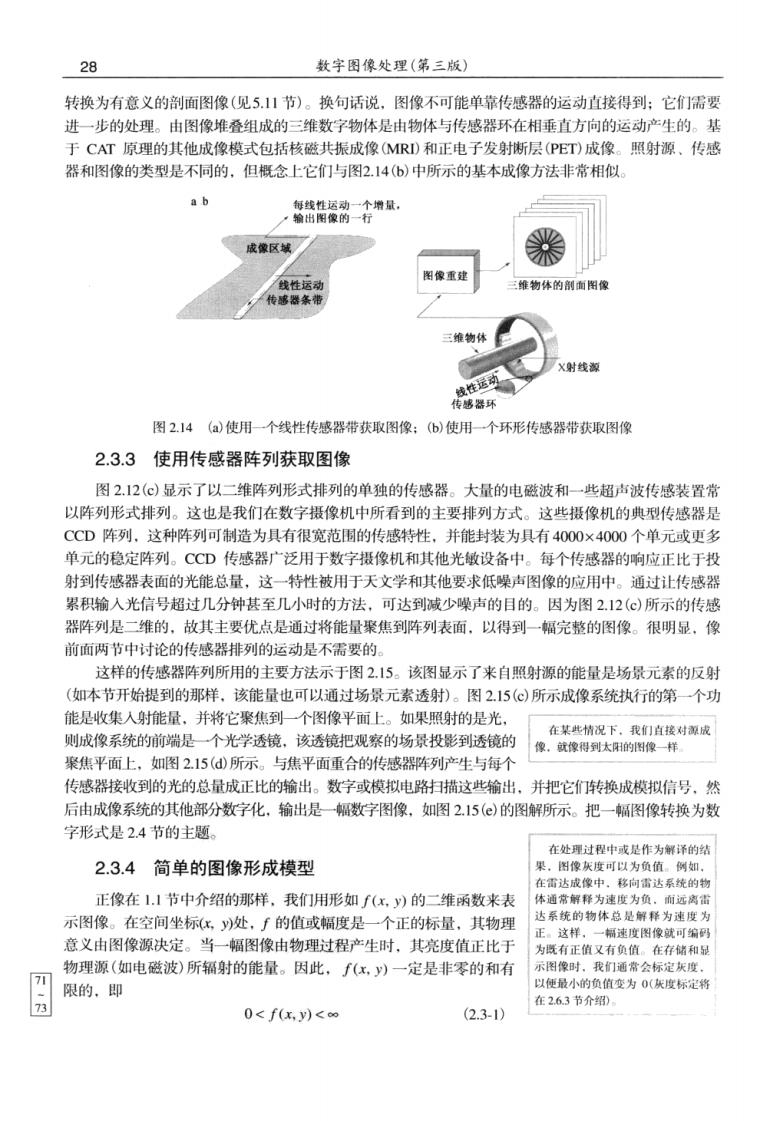
28 数字图像处理(第三版) 转换为有意义的剖面图像(见5.11节)。换句话说,图像不可能单靠传感器的运动直接得到:它们需要 进一步的处理。由图像堆叠组成的三维数字物体是由物体与传感器环在相垂直方向的运动产生的。基 于CAT原理的其他成像模式包括核磁共振成像MR)和正电子发射断层(PET)成像。照射源、传感 器和图像的类型是不同的,但概念上它们与图2.14(6)中所示的基本成像方法非常相似 ab 图像重 传器条 三维物体的副面图像 三维物体 X射线源 器环 图2.14(a)使用一一个线性传感器带获取图像:(6)使用一个环形传感器带获取图像 2.3.3使用传感器阵列获取图像 图2.12()显示了以二维阵列形式排列的单独的传感器。大量的电磁波和一些超声波传感装置常 以阵列形式排列。这也是我们在数字摄像机中所看到的主要排列方式。这些摄像机的典型传感器是 CCD阵列,这种阵列可制造为具有很宽范围的传感特性,并能封装为具有4000×4000个单元或更多 单元的稳定阵列。CCD传感器广泛用于数字摄像机和其他光敏设备中。每个传感器的响应正比于投 射到传感器表面的光能总量,这一特性被用于天文学和其他要求低噪声图像的应用中。通过让传感器 累积输入光信号超过几分钟甚至几小时的方法,可达到减少噪声的目的。因为图2.12(©)所示的传感 器阵列是二维的,故其主要优点是通过将能量聚焦到阵列表面,以得到一幅完整的图像。很明显,像 前面两节中讨论的传感器排列的运动是不需要的。 这样的传感器阵列所用的主要方法示于图2,15。该图显示了来自照射源的能量是场景元素的反射 (如本节开始提到的那样,该能量也可以通过场景元素透射)。图2.15(@)所示成像系统执行的第一个功 能是收集人射能量,并将它聚焦到一个图像平面上。如果照身射的是光 则成像系统的前端是一个光学透镜,该透镜把观察的场景投影到透镜的 在某此情况下我们直接对源成 像。就像得到太阳的图像一样 聚焦平面上,如图2.15(d)所示。与焦平面重合的传感器阵列产生与每个 传感器接收到的光的总量成正比的输出。数字或模拟电路扫描这些输出。并把它们转换成模拟信号然 后由成像系统的其他部分数字化,输出是幅数字图像,如图2.15()的图解所示。把一幅图像转换为数 字形式是2.4节的主题。 在处理过程中成是作为解译的绍 2.3.4简单的图像形成模型 正像在1.1节中介绍的那样,我们用形如(x,y)的二维函数来表 体通常解为速度为角。面远离 示图像。在空间坐标化y处,了的值或幅度是一个正的标量,其物理 达系统的物体总是解释为速度 意义由图像源决定。当一幅图像由物理过程产生时,其亮度值正比于 物理源(如电磁波)所辐射的能量。因此,fx,y)一定是非零的和有 以使最小的负值变为0(妖度标定将 在2.63节介绍) 0<f(x.y)<oo (2.3.1)
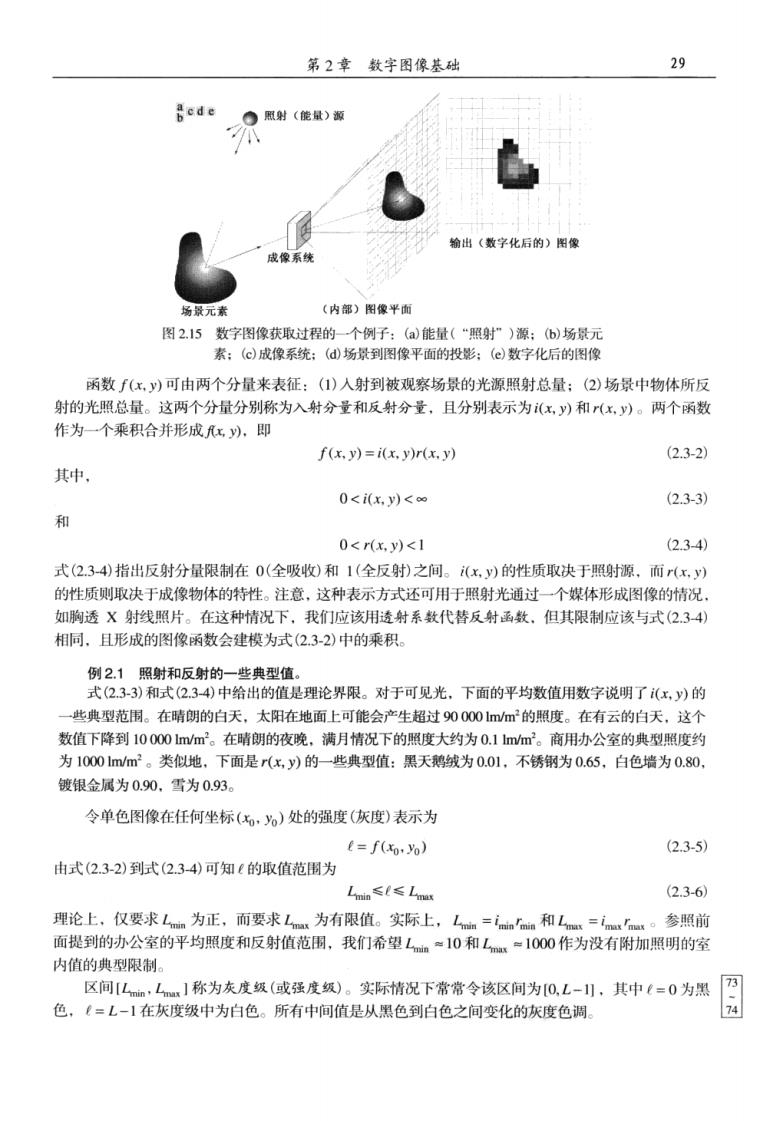
第2章数宇困像基础 29 bede 。射(能量) 输出(数字化后的)图像 场景元素 (内部)图像平面 图2.15数字图像获取过程的个例子:(a能量(“照射”)源:()场景元 素:(⊙)成像系统 ④场景到图像平面的投心数字化后的图像 函数f(x,)可由两个分量来表征:()人射到被观察场景的光源照射总量:(2)场景中物体所反 射的光照总量。这两个分量分别称为入射分量和反射分量,且分别表示为(x,y)和(xy)。两个函数 作为一个乘积合并形成红,即 f(x.y)=i(x.y)r(x.y) 2.3-2) 其中, 0<i(x,y)<∞ (2.3-3) 和 0<x,)<1 (2.34) 式(2.34)指出反射分量限制在0(全吸收)和1(全反射)之间。(x,y)的性质取决于照射源.而(x,y) 的性质则取决于成像物体的特性。注意,这种表示方式还可用于照射光通过一个媒体形成图像的情况。 如胸透X射线照片。在这种情况下,我们应该用透射系数代替反射孟数,但其限制应该与式(2.34) 相同,且形成的图像函数会建模为式(2.3-2)中的乘积。 例21照射和反射的一些典型值。 式(233)和式(234)中给出的值是理论界限。对于可见光,下面的平均数值用数字说明了(x,y)的 一些典型范围。在睛朗的白天,太阳在地面上可能会产生超过900001mm的照度。在有云的白天,这个 数值下降到10000mm2。在晴朗的液晚,满月情况下的照度大约为0.1lmm。商用胁公室的典型照度约 为1000mm2。类似地,下面是(x.)的一些典型值:黑天憩绒为0.01,不锈钢为0.65.白色墙为0.80 镀银金属为0.90.雪为0.93 令单色图像在任何坐标(无,)处的强度(灰度)表示为 (=f(%) (2.35) 由式(2.3-2)到式(234)可知(的取值范围为 L≤≤L (2.36) 理论上,仅要求Lan为正,而要求L为有限值。实际上,Ln=和La=ima。参照前 面提到的办公室的平均照度和反射值范围,我们希望L一10和L=10O0作为没有附加照明的室 内值的典型限制。 区间L,L】称为灰度级(或强度级)。实际情况下常常令该区间为0,L-小,其中(=0为黑丽 色,(=L-1在灰度级中为白色。所有中间值是从黑色到白色之间变化的灰度色调